ラピッド・コントロール・プロトタイピング(RCP)とは
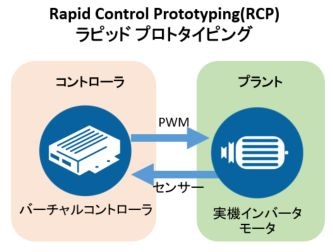
ラピッド・コントロール・プロトタイピングとは、実機のプラント(インバータの回路やモータなど)とコンピュータの中の制御装置(コントローラを模擬したリアルタイムシミュレーション)が一体となって一緒の時間を共有して動くテスト手法を指します。
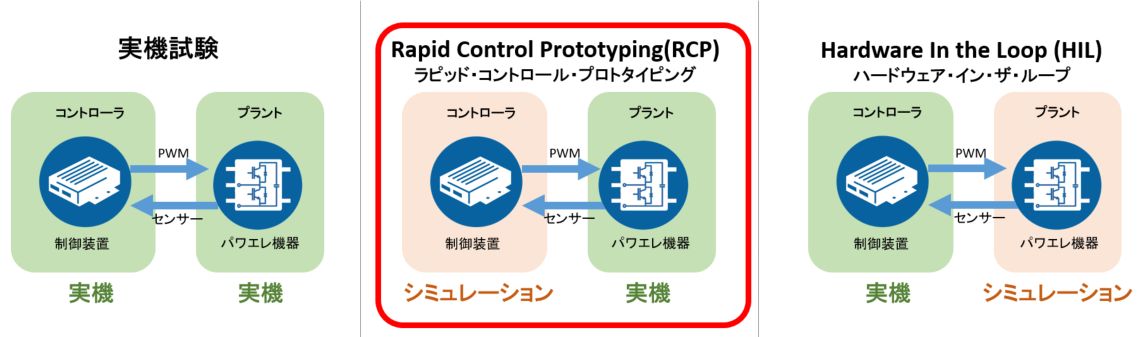
この様なテスト手法の種類としては、最も原始的しかし決して欠かすことの出来ない実機コントローラと実機プラントを用いたテスト(実機テスト)、バーチャルコントローラと実機モータを用いたテストであるラピッド・コントロール・プロトタイピング(以下、RCP)、そして実機コントローラとバーチャルプラントを用いたテストがハードウェア・イン・ザ・ループ(以下、HIL)があります。
RCPやHILといった言葉は使われる現場によって用法に違いがあり、大学などの研究の分野では純粋にテストを目的としたテスト手法として使われますが、自動車などの開発現場では モデルベース開発(以下、MBD)のプロセスのひとつとしてよく使われます。
以下は、MBDを軸にRCPを説明してゆきます。
組込みシステムとMBD(モデルベース開発)
組み込みシステム開発
プログラムで開発
可読性が低い
他のプロセスとの連携が困難
モデルベース開発

モデルで開発
可読性が高い
他のプロセスとの連携がし易い
多くの現場においてコントローラのプロセッサは組み込みシステムで開発されます。
組み込みシステムの開発で用いられる手段(言語)で代表的なものにC言語などがありますが、これらはリソースの制約が厳しくなりがちなプロセッサへの微妙な最適化が手作業で細やかに出来る反面、非エンジニアから見た可読性が著しく下がります。
コードが仕様書通りに動いているかどうかの評価は、実際にコードを実行してみて、その結果が日本語で書かれた仕様書に対してずれが許容範囲もしくは予想された範囲かどうかで判断されます。
これに対してMBDは、(原則的には)人間が直接コードを書く事が無く、MATLAB Simulinkなどに代表される”モデル”(ブロック線図で書かれた式やロジック)で書かれた実際に実行して試せる仕様書(いわゆる動く仕様書)で開発をします。
モデルは最後にコード生成され実行ファイルに変換されプロセッサに書き込まれますが、その動作確認は(もちろんコードでも行いますが)プロセッサに書き込む前にモデルベースで机上で動かして仕様書と突き合わせて確認する事ができます。
これはモデルがC言語などと比べてですが比較的可読性が高いプラットフォームであるためです。
このようなモデルを使った開発手法はモデルベース開発(以下、MBD)と呼ばれます。
現実にはMBDを使う事によって開発工程が減るという事はあまりなく、実際には開発工程が1つ増える事になるのですが、それでもMBDが導入されている背景としては、これによってコードの不具合を実機試験の前に発見できる事で手戻りによる試験コストの削減であったり、可読性の高いモデルでのデバッグが出来る様になる事からコードの品質向上にもつながる事が挙げられます。
MBDを導入する事によって全体のプロセス(開発工程)を長期的に捉えてみた場合の効率化が期待できます。
MBD(モデルベース開発)とRCP(ラピッド・コントロール・プロトタイピング)
MBDに初めて触れる人が混乱する代表的な用語にラピッド・コントロール・プロトタイピング(RCP)や後述のハードウェア・イン・ザ・ループ(以下、HIL)などが挙げられます。
MBDと言う言葉は、たとえば「モデルを使えばMBD」といった様に曖昧な概念として使われることが多く、開発工程として使われる事は実際にはあまりありません。
RCPとは数あるMBDを用いた開発もしくは研究プロセスのひとつです。
MBDとは、モデルを使った「動く仕様書」の作成が目的です。
ですが、この「動く仕様書」は、あくまでPC上で仮想化された机上のシミュレーションであって実機に持って行って本当にその通りに動くかどうかは、これだけでは判断することは出来ません。
例えば実機ではコントローラとプラント(モータやインバータなど)は物理的に別れていることがほとんどで、コントローラがプラントのフィードバックをもらって制御をするループであるフィードバック制御が行われる際に特に注意の必要な点として良く上げられるのが、このコントローラとプラントの相互通信にかかる時間(タイミングの遅延)です。
しかし机上のシミュレーションである”モデル”で最初からこれ(実機を使う事によるノウハウ)を考慮して設計するのは非常に難しいです。
ここで必要になるのがRCPプロセスです。
RCPではモデルの”制御”パート(以下、制御モデル)を実機プラントに繋げる事で、実際に通信による実世界の遅延を取り入れつつ制御モデルの動作検証を行います。
これによって、開発した制御モデルが実機プラントに対して整合性が取れているかどうかの検証を行う事ができます。
(ユースケースによっては、検証済みの”制御”モデルに実機プラントを繋げてプラント側の評価を行う場合もあります)
コントローラモデルの検証が出来たら、一般的には次にそのモデルはコード生成して実機コントローラに組み込まれることとなります。
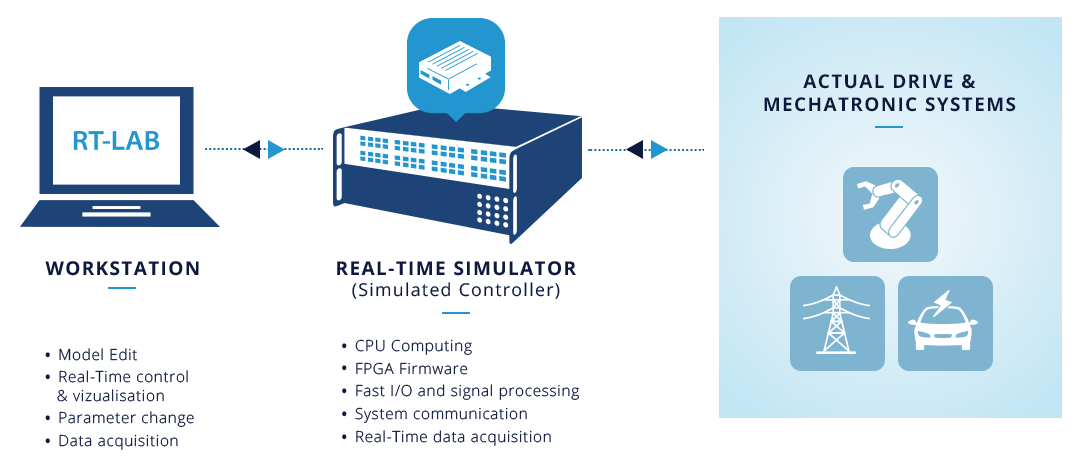
こうしたRCP装置を代表する製品が、弊社の取り扱うOPAL-RT社およびimperix社のリアルタイムシステムです。
制御システム開発を加速
OPAL-RTは、迅速な制御システムの開発、反復、テストに役立つRCP(Rapid Control Prototyping)ソリューションを提供し、開発リスク、時間、コストを削減します。
実際のシステムに実装する前に、モデルを入出力(I / O)インターフェイスで構成されたリアルタイムシミュレーターに(通常はMATLAB / Simulink™から)自動的にインポートします。
その後、様々なテスト環境でコントローラーの機能をより迅速に評価して、プロジェクト全体で円滑かつ迅速な実装を保証します。
開発プロセスの初期段階で設計エラーをより迅速かつ簡単に検出できるようになり、費用のかかる手直しの遅延を減らし、製品全体の品質を向上させます。
研究開発では、複雑なコーディングを必要とせずに、プロジェクトの初期段階でデモを実行できます。

資料のダウンロードにはNEATアカウントが必要です。
アカウント
こちらのリンクからご取得ください。
RCP Process
スピードと利便性
Improve Your Workflow, Streamline Teamwork
OPAL-RTのRCPシミュレーションソリューションを使うことで、あらゆるプロジェクトの初期段階でコントローラーの設計と仕様を検証できます。
シンプルなモデルベースのアプローチにより、複数のエンジニアリングチームが最も重要なプロジェクトのワークに集中できると同時に、リワークに費やす時間を大幅に削減できます。
Decrease Development Costs
RCPを使用して、高価で複雑なDSP /マイクロコントローラー/ FPGAボードを構築せずに、同期およびデータ収集機能を実装してテストできます。
設計プロセスの早い段階で問題を発見することにより、潜在的にコストのかかるミスのリスクを最小限に抑え、コストとスケジューリングへの悪影響が排除できます。
Flexible, On-The-Fly Innovation
包括的なソフトウェアインターフェースを提供し、コントローラーの動的なリアルタイムチューニング、調整、および修正を可能にし、テストサイクル期間を大幅に短縮します。
コントローラー上でコーディングすることなく、モデルをリアルタイムで実行できると同時に、いくつかのプロジェクトでモデルを再利用することができ時間を節約できます。
関連機能
分野

お問い合わせ先
 株式会社 NEAT
株式会社 NEAT
愛知県名古屋市千種区池下1-11-21
TEL:052-764-3311FAX:052-764-3632
Opal-RT Technologies,Inc.
1751 Richardson, Suite 1060 Montreal, Quebec, Canada, H3K 1G6
TEL:+1-514-935-2323 FAX:+1-514-935-4994
* 記載の会社名および製品名は、各社の登録商標および商標です。