

周波数もしくは時間領域におけるソースコードと汎用モデリング
そのアプリケーションと課題:VESTASにおけるデジタルツインの実現
Miguel Angel Cova Acosta
Specialist Grid Modelling and Analysis
Vestas
VESTAS:デンマークを本社とする世界最大の風力発電装置会社 https://www.vestas.com/
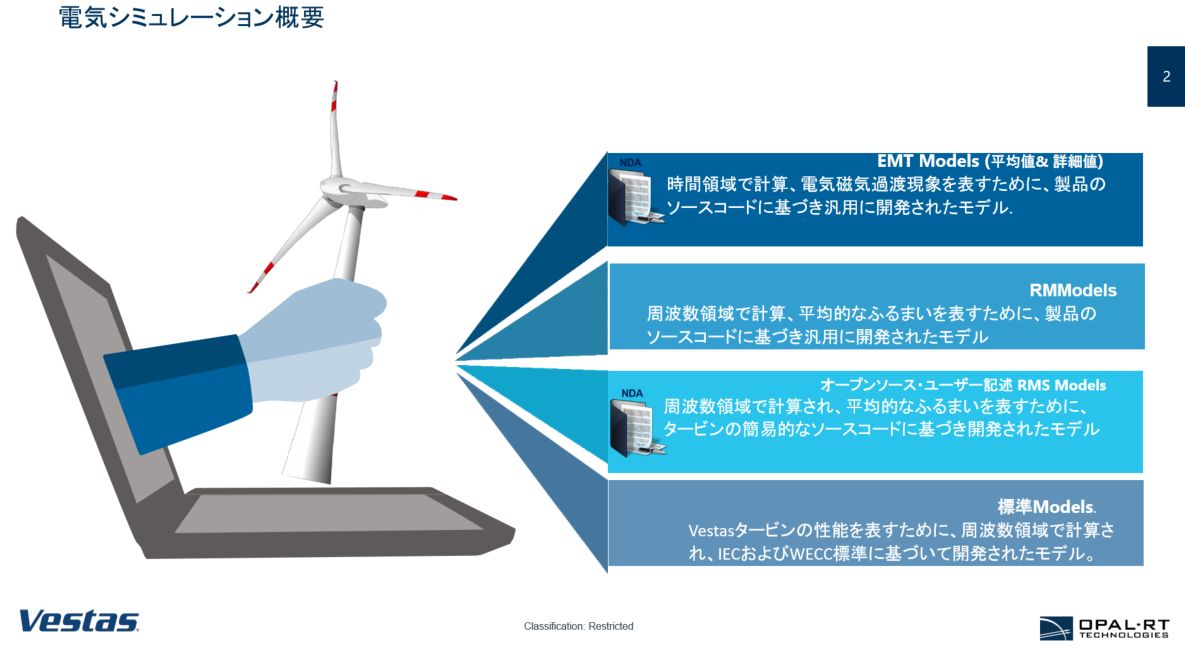
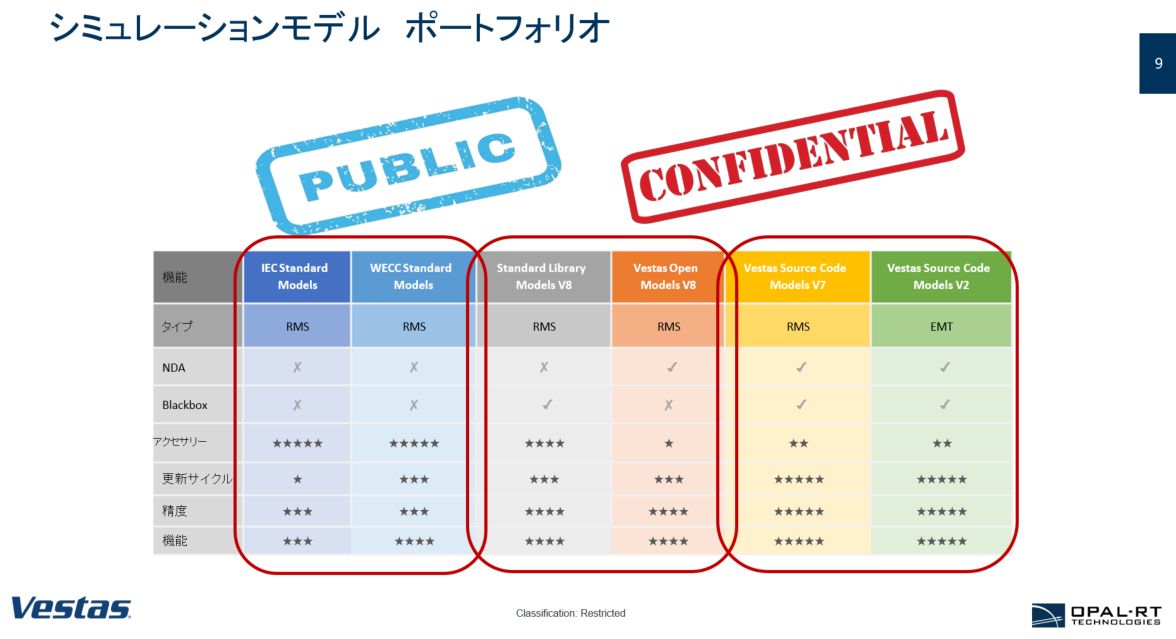
モデル開発でデジタルツインコンセプトをどう適用するかについて話をします。現在、市場やOEMから得られる利用可能なモデルは 下図に示す主に4つのグループに分けられます。
最初はEMTモデルです。
EMTモデルについては多くの情報があります。しかし、制御に関わるソースコード統合や、ハードウエアモデルの作成方法も確認する必要があります。
インバータのふるまいについては、OEMが解析したい現象により全く異なり、平均化もしくは、詳細な実装アプローチが選択されます。
2番目のグループはRMSモデルです。
正相順モデルで、OEMによるソースコード実装となりますが、他のアプローチも行われています。3番目はOEMから供給されるオープンソースモデルです。
これらはOEMによって市場の要望に合うように開発されたものです。そこでは、モデルに関してある程度の透明性を要求されます。
モデルについては、TSOが実際に何を運用しているかを考える必要があり、モデルの背後にある制御ブロックを理解する必要があります。
最後は、TSOやISOで使われる標準モデルです。
これらはIEC標準で正相順RMSモデルです。すべてを1つの動的モデルでまとめようとする動きがあります。
しかし、これを精度良く行うことは実際には不可能です。
また、ある特定の機能がなかったりして、すべてのOEMに対応することは難しいと思われます。
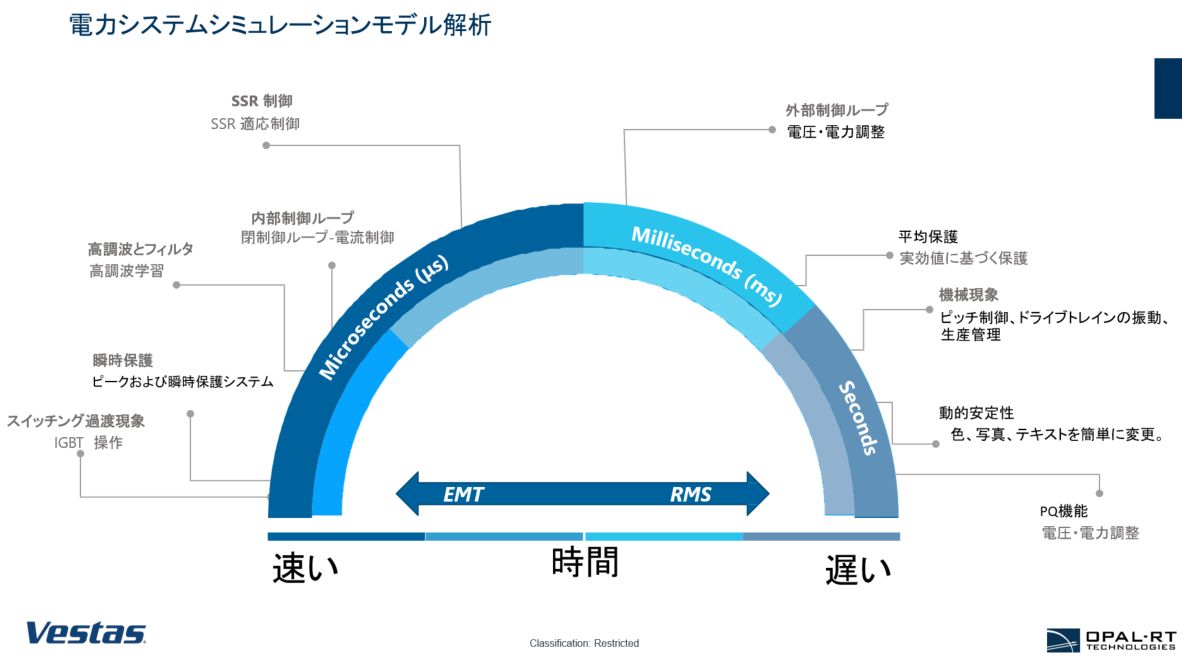
EMTとRMSは良く引き合いに出されます。
我々が持っている環境で、何時EMT時間領域モデルを使うか、RMSもしくはPhasorモデルを使うかです。
重要なこといつもEMTモデルを使う必要は無いということで、どのような課題を実施するかによって決まります。
参考に 新しい電力プラントの相互接続時における一般的な課題を記しました(下図)。
それぞれの項目について言及しませんが、以下のことがわかります。
PQ機能の実行、風力発電所の長期計画、何らかの倒立ベース技術を実行している時、詳細なEMSやEMTモデルソースコード実装は必要ありません。
もっと汎用のモデルでも同じ結果が得られます。
多くの風力発電所が接続されるグリッドの現状課題として、SSR等の機械的振動制御相互作用は、非常に小さい読取値となります。
そのような時にはスライド左側のEMTモデルに注目します。
しかし EMTはその唯一の答えではありません。
何故ならそのEMTモデルがどうやって作られたかによるからです。
経験から、ハイブリッド電力プラントの相互接続において、全てのOEMがEMTモデルを同じように作ってはいません。
その為、EMTツールと言っても実際の製品を正確に表していないことがあります。
重要なのは、それが時間領域または周波数領域であるかということだけでなく、モデルがどうやって作られたかということです。
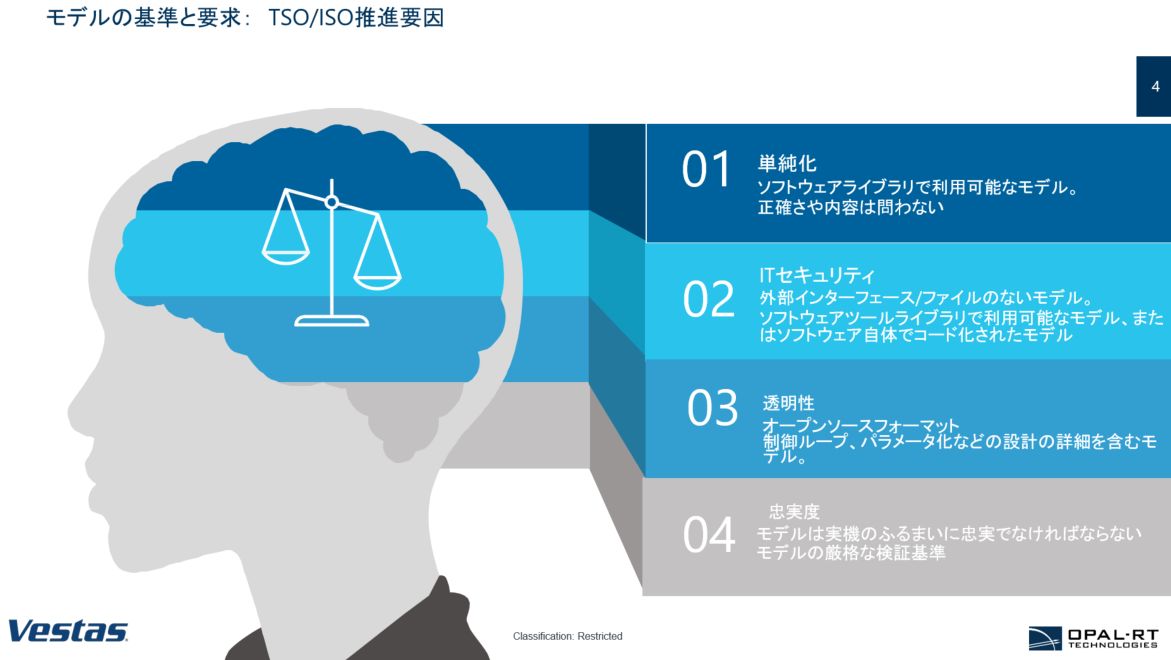
OEMがそれぞれのアプローチを取る理由の概要を少し説明します。
VESTASから見たTSOやISO推進要因をグループ化しました。
最初はSimplicityです。
国によりますが、主な関心事はモデルの成果物の単純さで、場合によっては知見が高くないこともあります。モデルの精度とは別に、ライブラリで利用可能なモデルが望まれます。
それは不可能で、デジタルツインコンセプトに反しています。
2番目のグループはSecurityに比重が置かれます。
これは非常に少数のTSOグループで、モデルの精度とは関係なく、外部ファイルを持つことを認めません。したがって、モデルを開発しているソフトウェアツールに応じて、そのソフトウェア内にコーディングする必要があります。
これもデジタルツインの概念に反します。
OEMが制御コード全体を、他のツールにコピーさせることは期待できないためです。
成熟したTOSのほとんどがグループ3と4にあります。
グループ3は 特別なTSOグループだけあてはまるわけではないですが、これらの主な推進要因は、透明性です。ここで、ウェビナーで見たあるTSOについて言及しておきます。
AEMO
AEMOは、精度だけでなく透明性にも非常に関心を持っています。そのため、私たち(またはオーストラリアのすべてのOEM)の義務として、オープンソースモデルをAEMOに提供する必要があります。
企業やOEMにとってオープンソースモデルは課題です。
次のスライドで見るように、高精度を維持したい場合にこれは大きな課題です。
基本的に風力タービン発電所の内部制御を公開する必要があるためです。
最後のグループは精度の忠実度です。
TSOがグリッドの現状課題を認識したとき、最も重要なことは、実際の製品を模擬できる正確なモデルを持つことです。RMSまたはEMTのいずれも、正確なモデルであり、これもAEMOが認めたことです。
それがAEMOは最も成熟したTSOと言われる理由です。
場合によっては、PSCADモデルも要求され、EMT環境になった時はHypersimに移行する柔軟性を持っています。
さもなければ、実行中のグリッド相互接続研究に応えることは不可能になるからです。
OEMが使用しているモデルを開発する方法について、ここに隠れているジレンマをハイライトで表示しています。
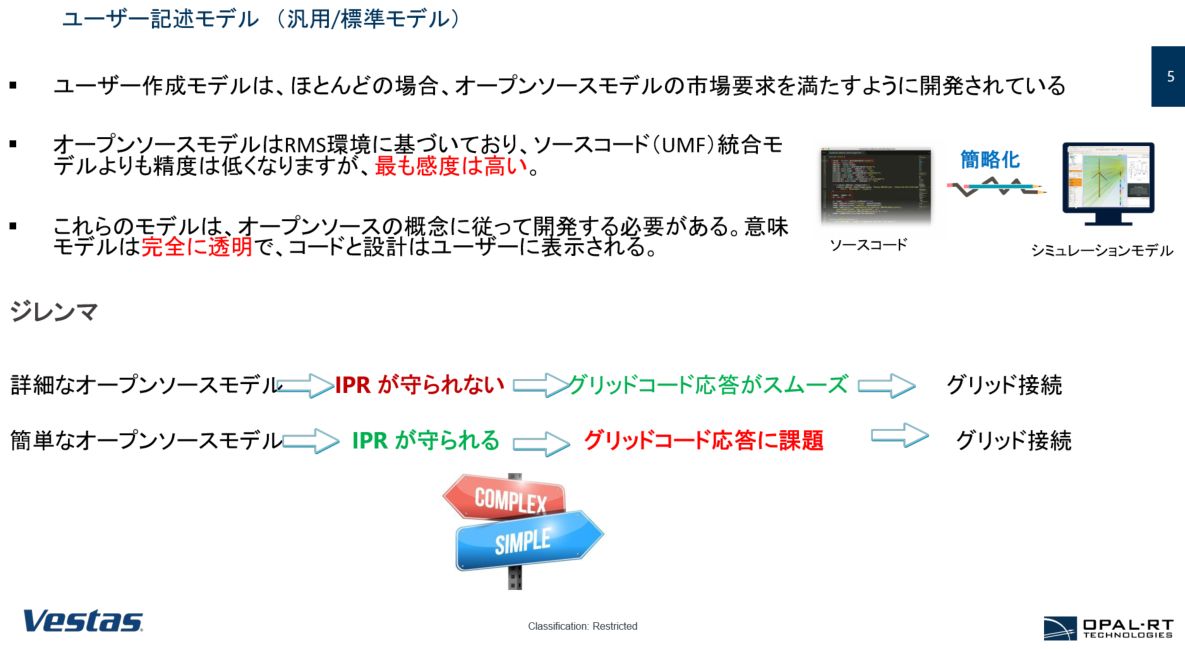
その場合、OEMは彼らの設計を公開する必要があります。
次に、製品実コードからモデルへのいくつかの簡略化が必要です。
ここで、モデルの精度と忠実度が損なわれる可能性があります。
ここにジレンマがあります。オープンソースモデルを詳細にしようとするほど、スムーズなグリッドコードコンプライアンス、または優れた相互接続手法が必要です。
しかし、会社のIPRが露出する危険が増大します。
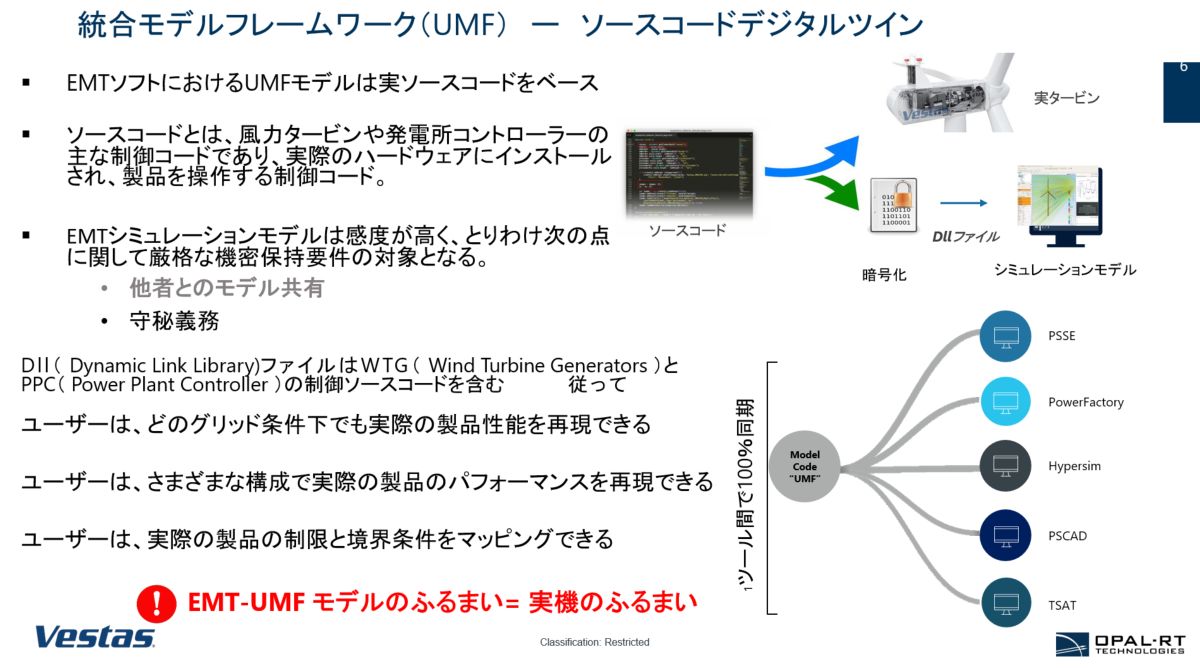
ここで関連する主題は、ソースコード統合モデルです。
VEATASで、デジタルツインのコンセプトを、モデル開発に適用した方法です。
我々のツールはすべてタービンも電力プラント制御も実コードを使っています。
シミュレーションプラットフォームに外部DLLファイルを使って実装しています。
これらのインターフェースやパラメータはそれぞれ異なっています。
その為、内部の開発者と相関を取ることは非常に困難です。
我々は内部UMFを採用しました。
これは統一フレームワークです。
シミュレーションツールに関係なく、単一のDLLが再利用可能になります。
相手がPSCADでもPowerFactoryでもなんであっても 一つのシミュレーションモデルとして提供します。
いつも同じDLLと制御コードがコールされます。
使おうとしているツールがRMSまたはEMTツールかどうか決まれば、制御は単純化できます。
しかし 何時も実プラントのソースコードをコールします。
我々は何らかの方法で知的財産を保護する必要があります。
モデルを出荷するときに、暗号化されたDLLまたはLIBファイルに実装するのはそのためです。
重要なことはこれらのモデルはどのような環境下でも実機のふるまいを模擬できます。
これが、倒立ベース技術(inverted base technologies)が高いタイプの現在課題に対処できる唯一の方法です。
倒立ベース技術(inverted base technologies )
ある物理モデルを仮定して、それがもたらす物理現象を求めることを一般的に順問題(forward problem)と呼びます。これに対して、ある観測されたデータ(結果)から、それに見合うようなモデル(原因)を推定することをインバージョン(inversion、逆問題)と呼びます。
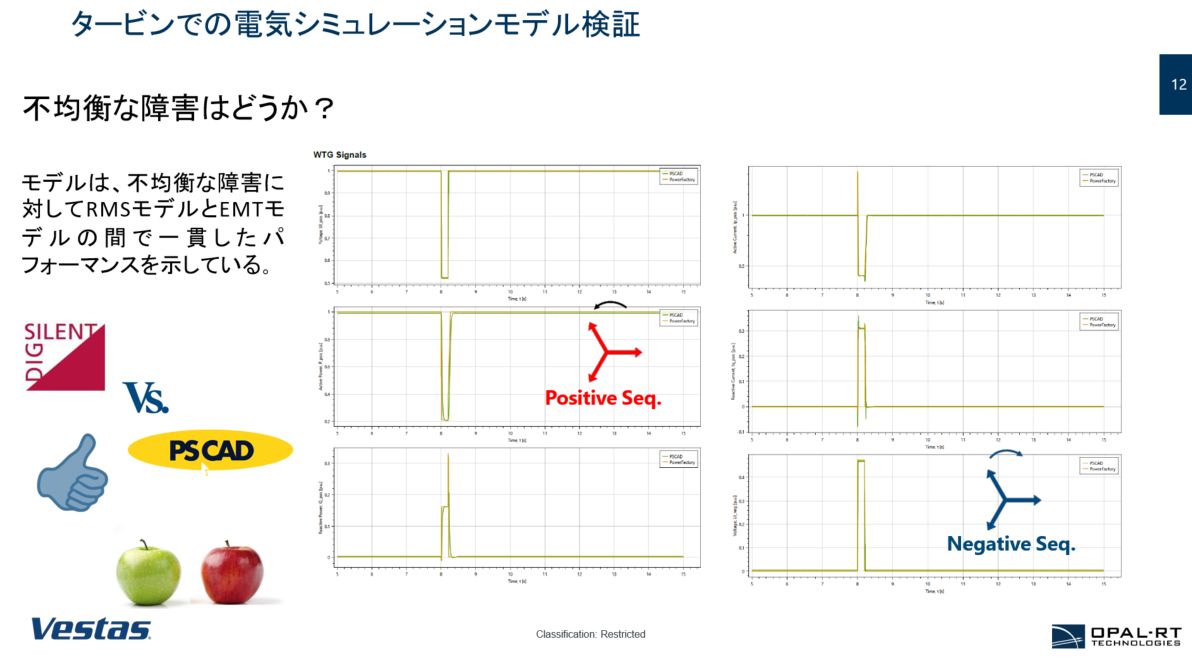
不均衡な障害や、深刻な補償を伴う脆弱なグリッドで、風力発電所の保護を調整する方法を決定する必要がある場合、唯一の方法は実際のプラントの制御を正確に表すソースコードの実装です。
制御だけでなく、実際に何が通信されるかも重要です。
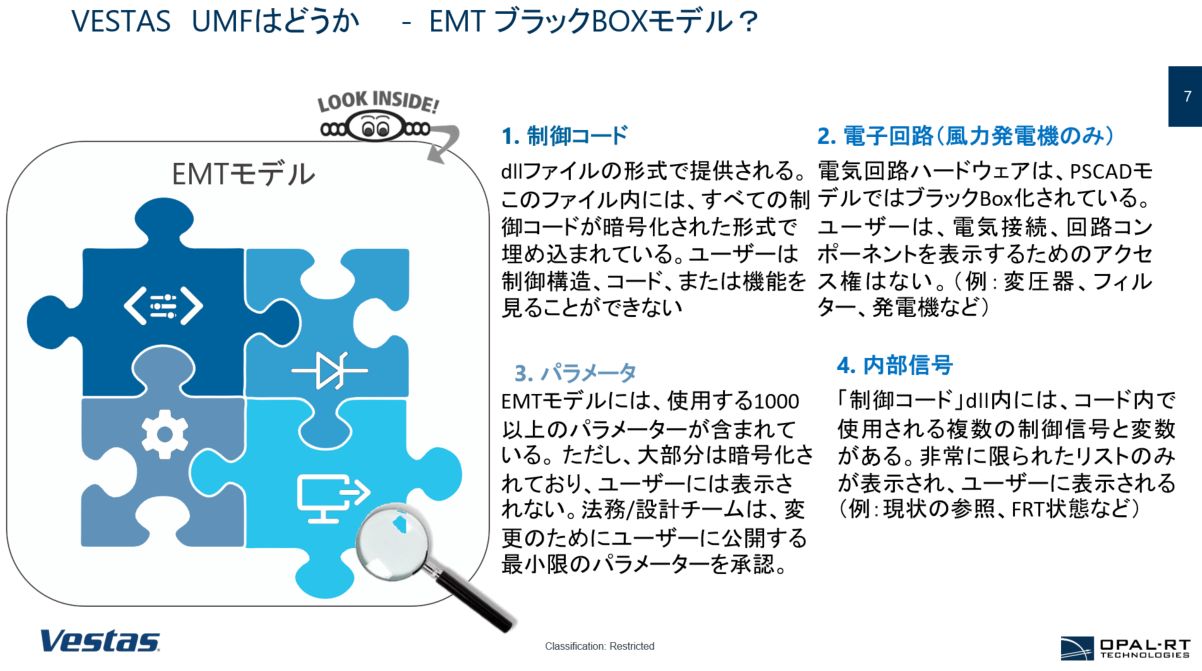
EMTブラックボックスモデルをみると、ソースコード統合にとっては、制御コードは1つのピースで、実機の制御があります。
これと別に電気回路を確認する必要もあります。
ハードウェアは正確に表される必要があり、インバータ、IGBT、フィルタ等すべてがモデル内に置かれる必要があります。
最終的に、すべてのふるまいが実際の製品に似ていることを確認する必要があります。
次はパラメータ化です。パラメータ化は非常に混沌としているというフィードバックが多くのTSOから来ています。
モデルのパラメータ化と実機はリンクしていません。
その為、パラメータ化は実際の製品と直接1対1で行います。
設計段階または製造段階から抽出します。
我々のモデルアプローチは、稼働中の発電所から抽出できる外部パラメータファイルを呼び出し、モデルが配置されているフォルダに単にダンプするだけで、操業プラントのパラメータを得ることになります。
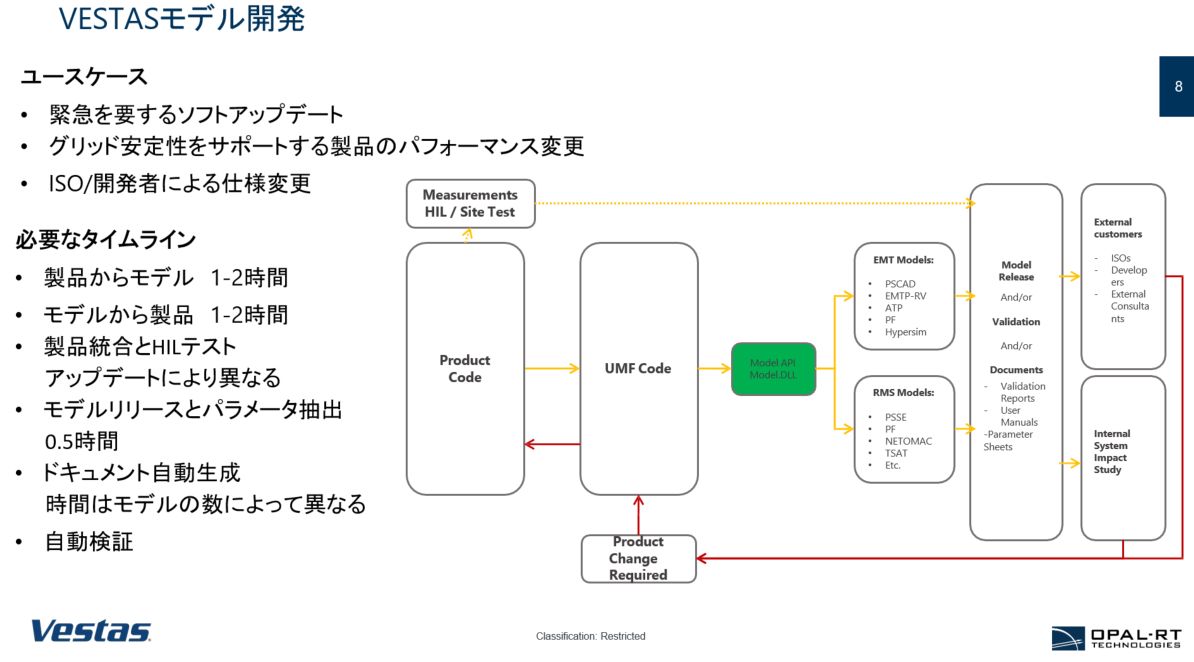
内部的にはモデル開発をどのようにするかですが、我々がUMFコードと呼ぶものを中心に置きます。
以下に示すようなさまざまな商用ツールや、ソフトウエアツールと対話する個別ラッパーがあります。
EMTとRMSのどちらを使うかにより制御ループを単純化します。
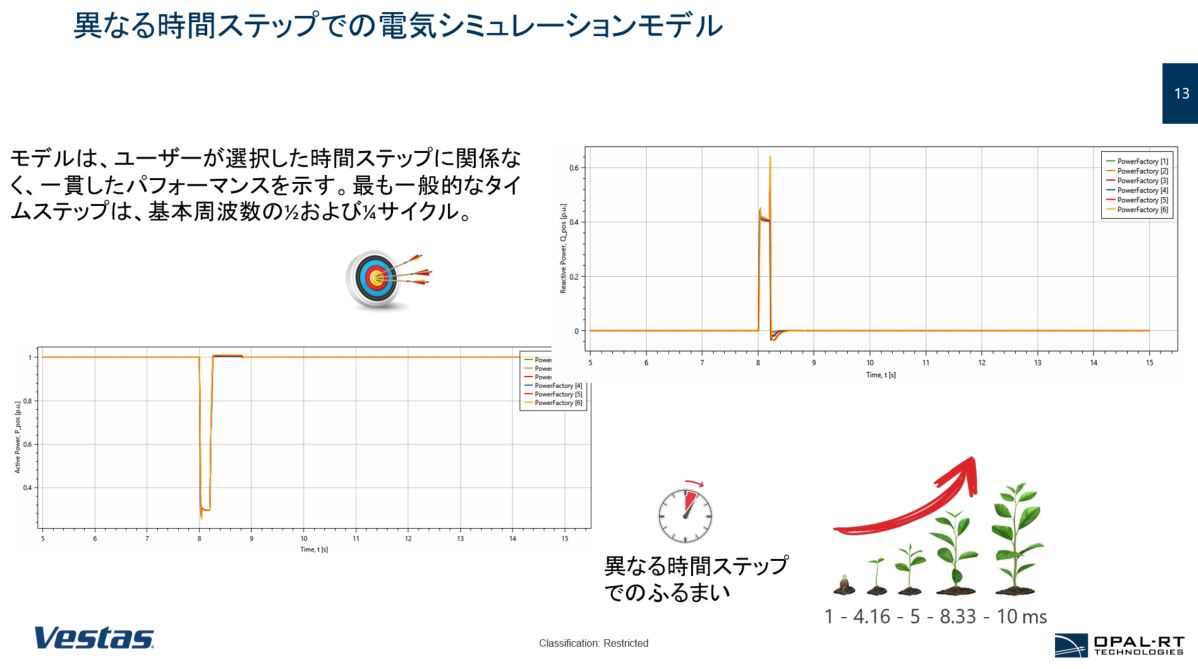
RMSモデルの場合は速い制御は使えない為、通常は遅い時間ステップで動作させます。
その為、高周波制御ループの一部に対応できないので、単純化された同じDLLが生成されます。
その為、私たちがモデルを出荷するとき(これがオーストラリアに行くかどうかに関係なく)、同じDLLから生成します。
以下はサポート資料です
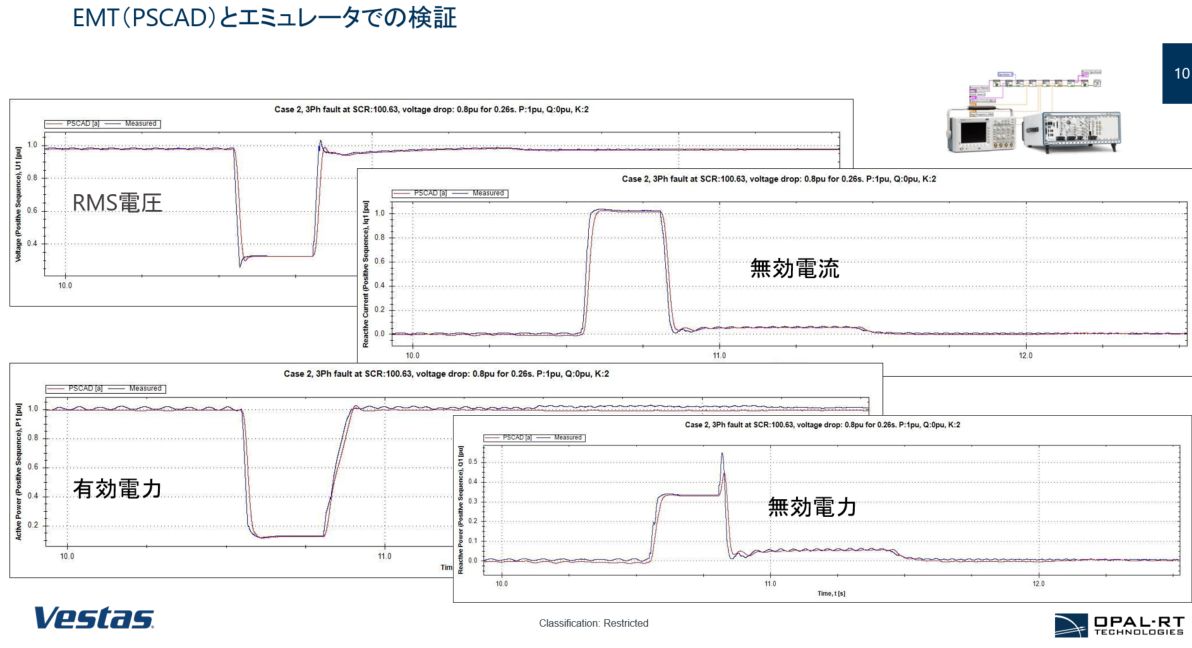
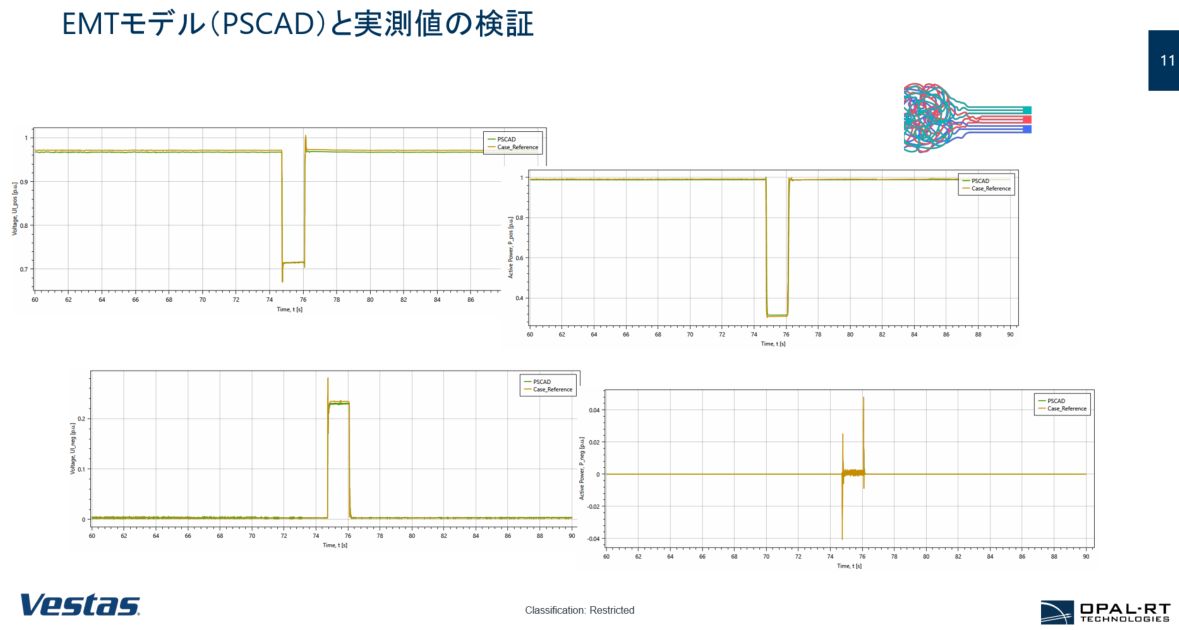
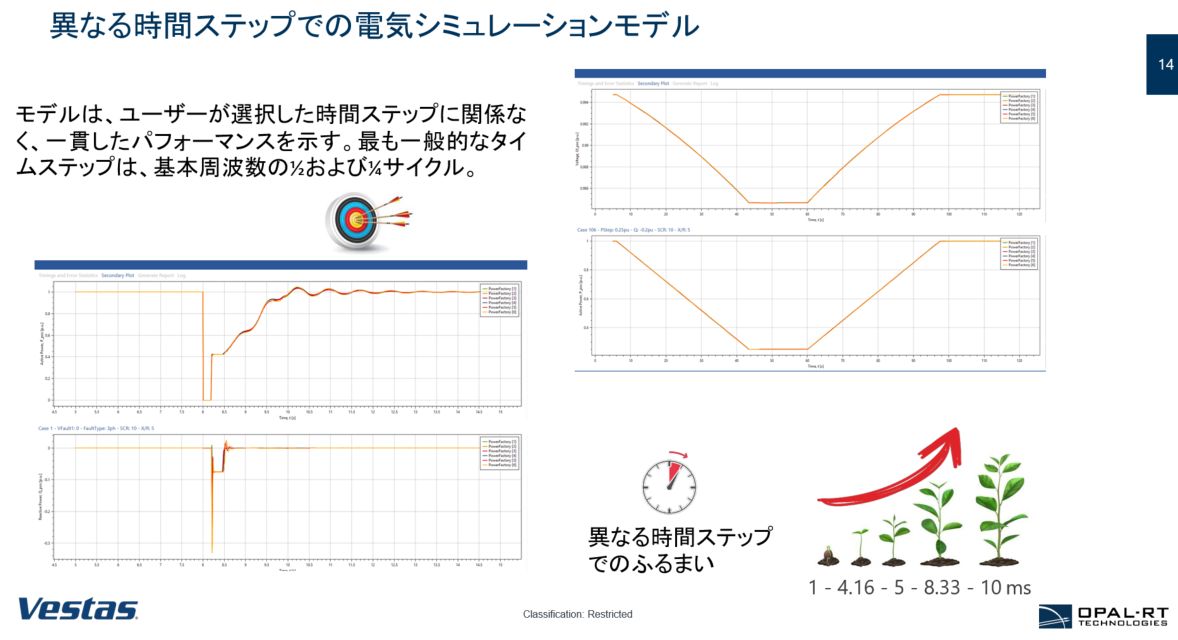
さまざまな利用可能なモデルによる私たちの理解の概要になります。精度機能などの観点から分類された検証結果の概要です。同じDLLですので、何度もモデルを走らせ確認できます。
自動的にドキュメントを作成し、モデルが正確であり、ツール間で了解出来ることを検証しています。
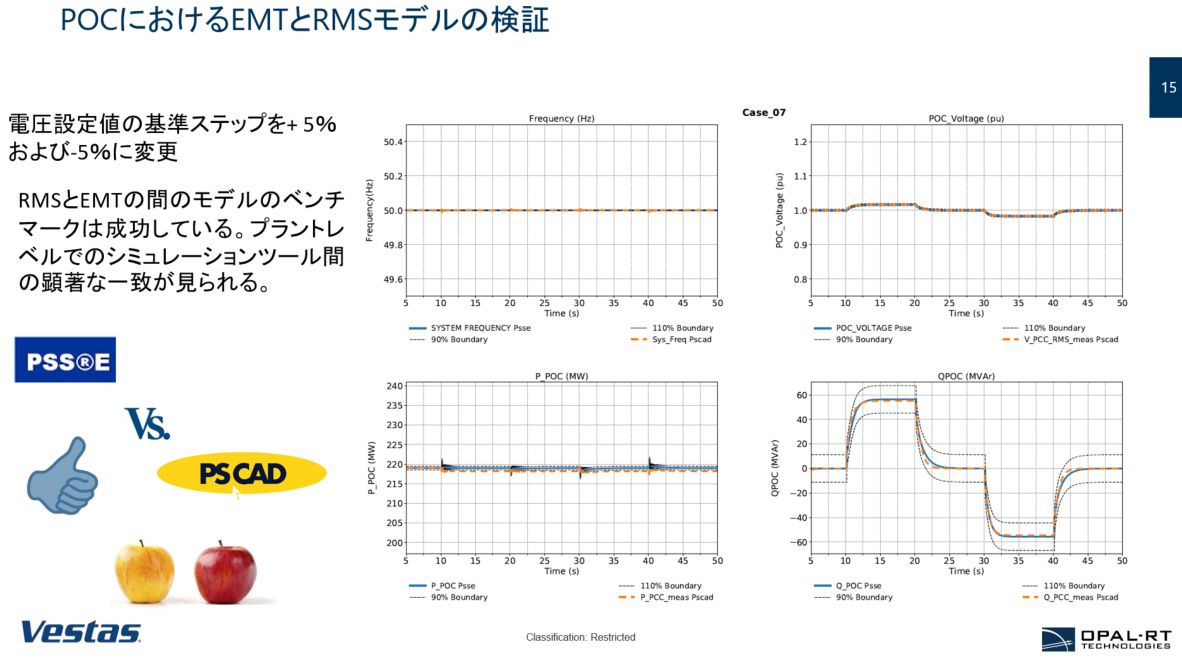
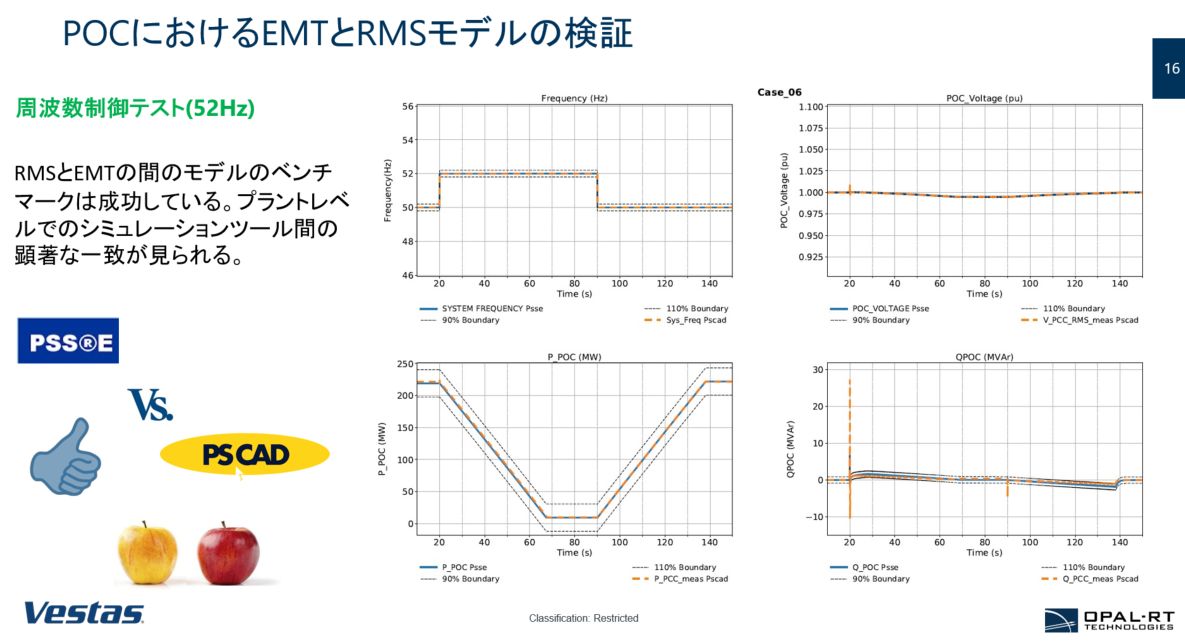
調査している現象が、RMSまたはEMTツールでカテゴリ毎に正確に実施でき、それらが良く一致していることが確認できます。
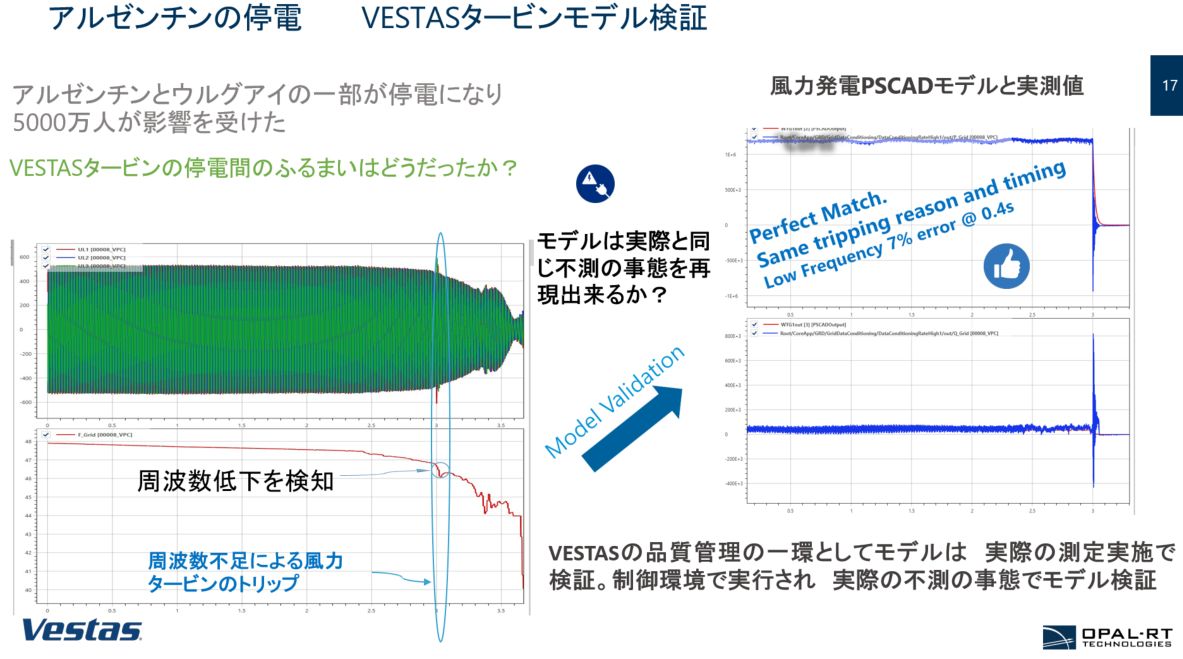
これは数年前にアルゼンチンで起きたことですが、グリッドに重大な不測の事態が起きた時、確認の為瞬時値データを抽出し、そのデータをモデルに読み込み、実際の状況下の現場とおなじふるまいを再現してサイドテストや測定を行って多くの要因を制御できます。
タービンを直接操作することは出来ませんが、仮に周波数と電圧の両方を変化させる不測の事態が発生する可能性がある場合、それを再現させ、モデルを一つずつチェック確認します。
これは基本的にデジタルツインの概念に従ってシステムを構築しているからです。
それを電力システムの相互接続分析に置き換えると,倒立ベース(inverted base technologies )発電源の比率が高い電力システムにおける将来の課題として、相互接続前の調査を実行するには、モデルが出来る限り正確でなければならないということです。
これに対する答えはコンピュータの能力ではなく、デジタルツインをどう実現するかです。
デジタルツイン連載


