エンジン、モータ、変速機と使用環境が異なる対象に合わせて実装面でも工夫を施し、計測を可能としています。
例えば交番電磁場下での利用となるモータでは、ロガー本体は磁場の影響を受けないものの、センサとロガー間でノイズを拾うためアンプ前段にノイズ除去フィルタを加えることでS/N 比を確保しております。
以下、具体的な事例として無段変速機(以下 CVT)における計測について紹介します。
CVTにおける計測
ベルト式 CVT は図 8 に示す金属ベルトと可動式の二つのプーリからなります。
油圧力により可動するプーリに挟まれたベルトが二つのプーリ間を楕円状に回転し、プーリに掛る半径を変化させることにより、動力伝達と変速を行います。
ベルト自体は図 9 に示すように多数のエレメントをリングで束ねた構造になっています。
CVT の性能は図 9 に示すベルト内のエレメントとリングの相互作用、ベルトとプーリとの相互作用により決まるため、ベルト要素間の作用力や変形、またプーリとの作用力を詳細に把握することが必要となります。
このため、①エレメントの作用力を歪ゲージにより、②ベルトからプーリに作用する力を加速度センサにより計測しています。
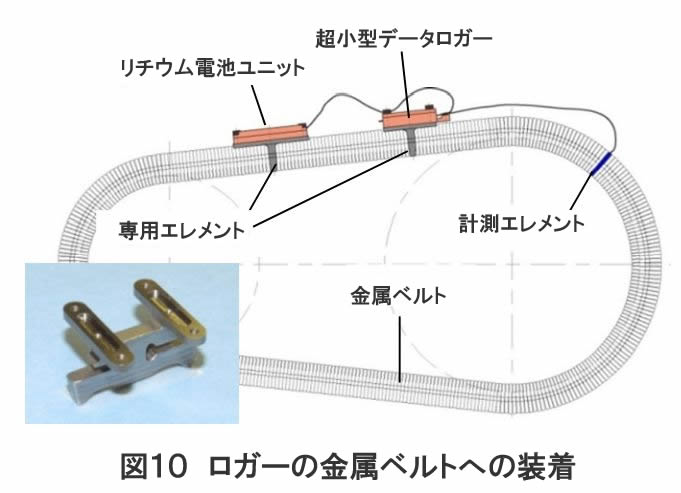
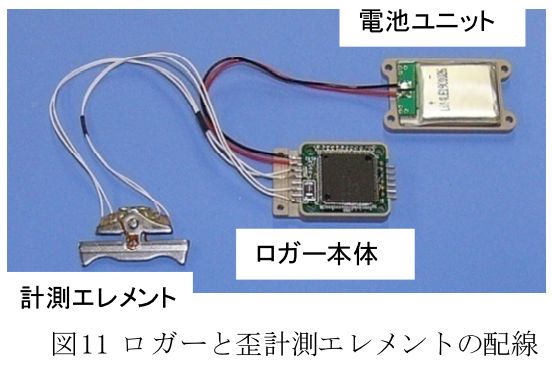
図 10、11 に歪ゲージを貼付けたエレメントとロガー、電池ユニットとの配線と搭載方法を示しています。
ベルトへの実装は、図 10 に示すようなエレメント2枚分の厚みを持つ専用エレメントにロガーと電池ユニットを搭載しています。
ロガーと電池ユニットの位置は、計測エレメントに影響を与えないように一定の間隔を持たせて配置しています。
また、各エレメントをつなぐリード線はベルトの動きに応じてエレメント間隔が長短変化するのでそれに応じた最適な長さを求め、配線しています。
実験計測は、変速機本体では密閉空間となり計測エレメントの交換が不可能となるため、箱形に改造した専用の試験装置を用いています。
位置情報としての光源を駆動プーリ側に配置しています。
計測回転数は 800rpm です。
テレメータでは常時通信を確保しなければなりませんが、使用した試験装置内ではアンテナのセッティングが十分にできず通信不良の区間がでます。
このため部分的にノイズが大きく計測できていない所がありますが、超小型データロガーでは良好に計測ができています。
ここでの金属ベルト伝動様式は張力を利用した一般的なものとは異なります。
駆動側プーリでベルトがプーリから挟まれた状態で回転方向に押され、ベルト内部でエレメント間の圧縮力が発生することで、従動側プーリに動力が伝えられるプッシュ式であります。
図から、駆動プーリの出口側でプーリからベルトが押されることでエレメント間の圧縮力が高まり、弦部を圧縮力を保ったまま通過し、従動プーリ内で圧縮力が出口に向って解放されることで動力が伝達されていることが分かります。
図はベルト 2 周分のデータを連続して示しているが、再現性が良好で、ノイズの無い精度の高い計測データを得ることができます。
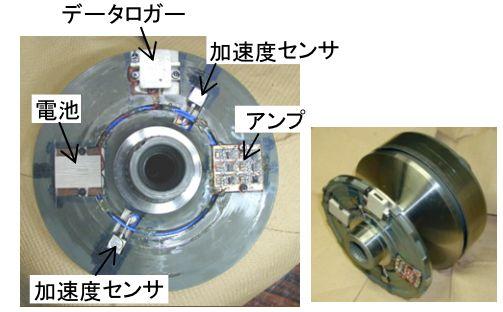
図12 CVTプーリへのロガー搭載
図 12 にプーリ部振動現象を捉えるために、プーリ側面に複数の加速度センサとロガーを実装した状況を示しています。
振動現象はプーリを支える軸受、ケースの影響も受けるため、変速機本体と箱形専用試験機の両方で計測を行い比較評価を行っております。
センサ、ロガー、電池ユニットの実装では、ケースと干渉しないようにプーリに溝加工を施し装着を可能としています。
加速度センサ情報は、ベルトとの相対位置関係、すなわちベルト走行軌道上で入口、出口のどこに位置するかで整理するため、光トリガ光源を、加速度センサがプーリ入口にきたときにデータロガーの光センサが受光するよう、プーリに近接させて試験機内部に配置しています。
このように、ロガーにより従来方法では困難であった計測を実現し、ベルト内およびプーリとの相互作用のメカニズムの考察に基づいた各部形状の改良により、ベルト性能の向上を果たしています。

お問い合わせ先
 i-NEAT株式会社
i-NEAT株式会社
愛知県名古屋市千種区池下1-11-21
TEL:052-764-3341 FAX:052-764-3340
* 記載の会社名および製品名は、各社の登録商標および商標です。