RT20で報告された、先端的なリアルタイムシミュレータ関連の各講演を紹介いたします。
RT20 | HIL(Hardware in the Loop)と‘Digital Twin’ RT20 (日本語字幕つき)
動画のご視聴にはNEATアカウントが必要です。アカウントは
こちらのリンクからご取得ください。
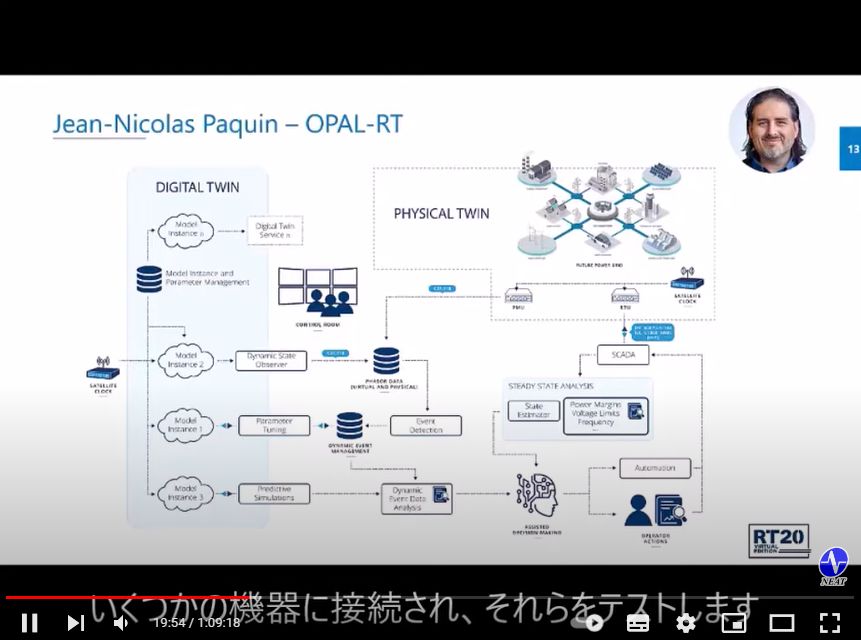
Michael Grievesが2003年に‘digital twin’という言葉を最初に発して以来、多くの解釈や議論がなされています。
"digital twin"は多くのことを意味しますが、リアルタイムシミュレーションやHiL(Hardware in the Loop)テストで取り上げる場合、ある程度限定されてきます。
一例として、ハードドライブのミラーコピーについて考えてみます。
定期的に更新される使用中のハードドライブのコピーは、必要に応じた冗長化を目的としています。
ミラードライブの内容は、いつでもソースドライブの複製として検証できます。
つまり、ハードドライブの4次元の保護メカニズム(データの長さ/幅、ビット深度、および期間または時間の次元)です。
この比喩だけでは、ここで概略を適切に説明する為には十分ではありません。
RT20 | Considerations for Performing Power-Hardware-in-the-Loop Based Motor Emulation: Modeling and Control
Author : Amit Kumar KS
動画のご視聴にはNEATアカウントが必要です。アカウントは
こちらのリンクからご取得ください。
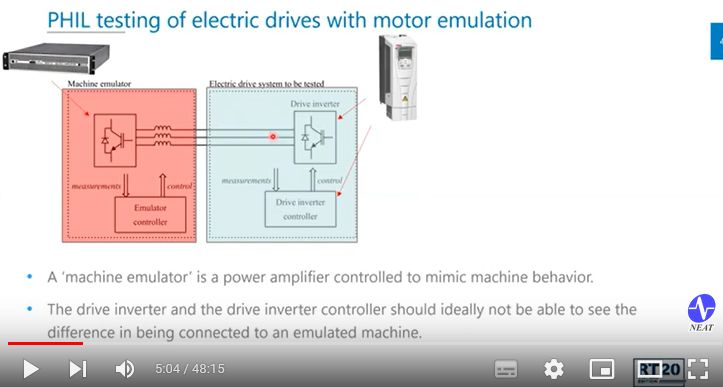
パワーハードウェアインザループ (PHIL) ベースのマシンエミュレーションは、電気駆動システムのテストを簡素化する効果的なアプローチとしてますます認識されています。
マシンエミュレーションでは、パワーエレクトロニクスコンバーターが電気モーターの動作をエミュレートするため、電気モーターのプロトタイプを作成する前に駆動システムをテストできるようになります。
マシンエミュレーションは電気駆動システムのテストプロセスにいくつかの利点をもたらし、最終的には駆動システムの市場投入までの時間の短縮につながります。
このプレゼンテーションでは、マシン エミュレーションに関する 2 つの重要な実装側面について説明します。 1 つは、マシン モデリングのアプローチと詳細レベル、そしてその後のエミュレーションの精度への影響です。
このプレゼンテーションでは、特定のマシンの動作を正確にエミュレートするための詳細なマシン モデルの必要性について概説します。
2 番目の側面は、いくつかの関連する考慮事項です。
マシン エミュレーションのための PHIL インターフェイスの閉ループ制御、パワー アンプの選択に基づく関連する帯域幅とその他の制限、およびドライブ コンバータ制御とのエミュレータ制御の相互作用です。

お問い合わせ先
 株式会社 NEAT
株式会社 NEAT
愛知県名古屋市千種区池下1-11-21
TEL:052-764-3311FAX:052-764-3632
Opal-RT Technologies,Inc.
1751 Richardson, Suite 1060 Montreal, Quebec, Canada, H3K 1G6
TEL:+1-514-935-2323 FAX:+1-514-935-4994
* 記載の会社名および製品名は、各社の登録商標および商標です。

