概要
本論文では、(i)PMSMモーター、(ii)パワーエレクトロニクス、(iii)バッテリー、(iv)メカニカルドライブモデリング(道路情報を考慮)、(v)オブザーバー(実機の内部状態の推定値を、その入出力の測定値をもとに算出するシステム。詳しくはReferenceの7および8を参照)とコントローラーを備えた電気自動車のシミュレーションについて説明します。
シミュレーションは(i)2台のリアルタイムシミュレーターに分割されたHIL / RCPの各システム(1つ目は電気自動車、2つ目はコントローラーの役割を担う)、(ii)バッテリーをシミュレートするシステムの2つのステップで実行されます。
(i)故障とシステム障害、(ii)コントローラーのパフォーマンス、(iii)数値安定性などの現実的な側面が研究されています。
キーワード:PHIL、HIL、RCP、リアルタイムシミュレーション、FPGA、電気自動車、バッテリー、DTC
1.イントロダクション
多くの業界では、制御システムの市場投入までの時間を最小限に抑えるために、リアルタイムHardware-In-the-Loop(HIL)シミュレータの計算能力を利用し、システムのプロトタイプを作成してテストを行っています。
インバーター駆動の様な速いスイッチング周波数に対する需要の高まりに伴い、コントローラー技術も飛躍的に向上しました。
FPGAはリアルタイムシミュレーション市場において、高速スイッチングインバーターのプロトタイプを作成してテストし、500ns未満のレイテンシーでパワーエレクトロニクスシステムとモーターをシミュレートする用途における主要なテクノロジーになりました。
この短い制御周期は、高調波および過渡現象を適切にシミュレートし、コントローラーの励起パルスとコントローラーにフィードバックされるシミュレーター電流間の遅延を最小限に抑えるために必要となります。
さらにHILシミュレーションにより、高価な機器に損傷を与えかねない故障などといった危険な条件下でのシステムをテストすることができます。また、システムパラメータのシミュレーション中の変更も可能です。
加えて、Power-HIL(PHIL)シミュレーションは、実機コンポーネントとシミュレーション上のコンポーネント間での電力伝達を実現します。
これにより、システム内でも要求を適切にモデル化することが困難な(もしくは複雑すぎてモデル化が難しい)部分を実機に置き換えてテストをする事が可能になります。
この論文では、最初のステップとして、(i)電気自動車と、(ii)モータードライブのFPGAベースのHIL / RCPシミュレーションを、それぞれ2台のリアルタイムシミュレータに分割して説明します。
1台目のシミュレータには、パワーエレクトロニクス、バッテリー、電気モーター、そして機械システムモデルを実装し、2台目では、高周波でスイッチングするモーターコントローラーを実装します。
2番目のステップでは、PHIL / RCPシミュレーションについて説明します。
ここでは、バッテリーモデルが実際のバッテリーセルに置き換えられます。
以上の関係性を図1にまとめます。
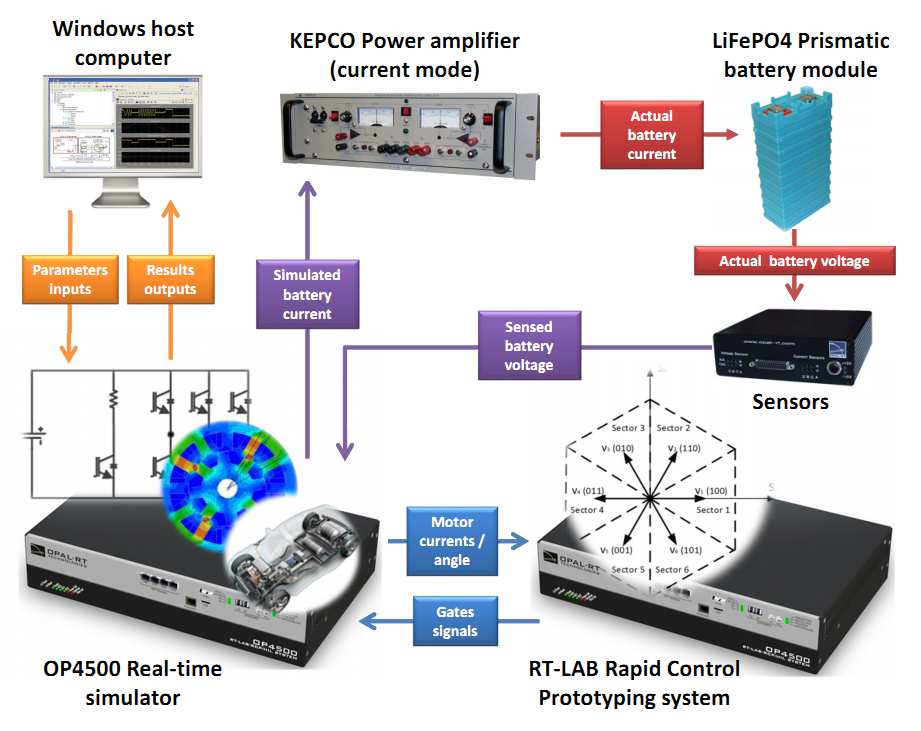
図1:実際のバッテリーセルを備えた電気自動車のPHIL / RCPシミュレーションのセットアップ
2.モデリング
2.1.PMSM
モーターをモデル化する時、そのモデルの精度はテストの目的と密接に関連してきます。
たとえば、テストが線形動作の範囲を対象としている場合、電流とトルクの高調波の評価をしないのであれば、モデルは線形dqモデルで十分です。
飽和などの非線形性を考慮した高度なモデルの場合は、有限要素解析(FEA: Finite Element Analysis)を使用することで可能です。
どちらの場合においても、ここで使用しているソフトウェアを使う事で対応できます。
仮想PMSMモーターモデルはOPAL-RTのリアルタイム・シミュレータOP4500 Targetに搭載されている Kintex 7 FPGAボードに実装されており、そのデジタル入力でのゲート信号の受け取りから、モーター電流のアナログ出力までの合計レイテンシーは1μsです。
これはPHIL / RCPアプリケーションに適していると言えます[1,2]。
今回、選択するモーターは、JMAGによるV字型マグネットローターを備えた内部永久磁石機(IPMM)です。 モーターパラメータの詳細は後述の表1に記載しています。
線形dqモーターの方程式を以下に要約します。つまり、状態方程式はこの様に与えられ、
出力方程式は以下の様に、
そして電磁トルクに関しては、次の式で与えられます
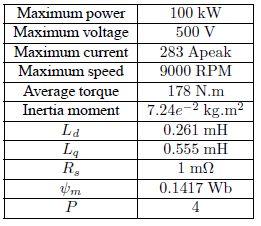
表1: PMSM パラメータ
2.2.パワーエレクトロニクス
三相2レベル パワーエレクトロニクス インバーターも、OPAL-RTの電気・ハードウェアソルバーeHSを使用してOP4500 TargetのKintex 7 FPGAボードでシミュレートします。
eHSで使用される方法は、電流源と並列の一定のコンダクタンスGsで構成される離散時間スイッチモデルに基づいています[3]。
この方法には1つ欠点があり、パラメータGsの値を選択する必要があります。
OPAL-RTはこの問題を解決するため、(i)整流損失および(ii)Simscape Electrical™(旧SimPowerSystems™)とeHS間のキーとなる信号のシミュレーションエラーの最小化に基づいてGsを最適化するアルゴリズムを開発しました。
さらに、FPGA / PMSMモデルで計算された電流は、図2に示すように、制御された電流源を介して、数値安定性を確保するため最適化されたRCダンパーと並列にインバータ回路へ注入されます。
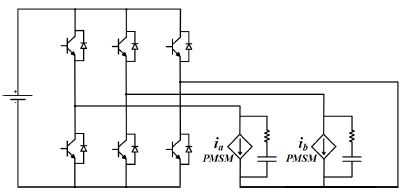
図2:PMSMとeHS間の接続
2.3.バッテリー
バッテリーは通常、遅い時間応答を示すので、複雑なモデルであってもMATLABRSimulinkR上でTargetのCPUへ、リアルタイムモデルとして実装する事ができます。
このシミュレーションでは、図3に示すように、各バッテリーセルはテブナン等価バッテリーモデルを使用してモデル化されます。
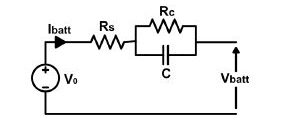
図3:バッテリー 一次モデル
ここで、Rsはオーム抵抗、RcとCはバッテリー分極効果、Vbattはバッテリー端子電圧、V0は開回路電圧です[4]。
このシミュレーションに使用されるバッテリーのパラメータは一定ですが、ルックアップテーブルに実験値を実装することで、充電状態かつセル温度の関数として設定できます[5]。
バッテリーパックは同じパラメータ(つまり、同じ端子電圧を持つ同一のセルの構成)としてモデル化されています。
その結果、モデルに乗算が適用され、バッテリーパック全体がシミュレートされます。
バッテリーを管理する方程式は次のようになります。
2.4.メカニカル・パワートレイン
機械システムは電気システムよりも動的応答が遅く、(FPGAではなく)TargetPCのマザーボードに搭載されている標準のCPUコア上に実装できます。
複雑なモデルは、MATLABRSimulinkR、SimScapeTM、またはその他のマルチドメイン・シミュレーションを使用してシミュレートできます。
シミュレーションの実行中に機械システムのパラメータをリアルタイムで変更して、モデルパラメータの変更が、テスト対象のコントローラ・ハードウェアのパフォーマンスに与える影響を分析可能です[6]。 車両の自由体図を図4に示します。
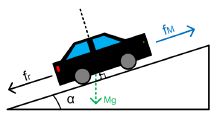
図4:車両の自由体図
機械式パワートレインは、次の手順に従ってモデル化されます。
車両を加速するために電気モーターが克服されなければならない抵抗力を定義すると、車両に作用する勾配αの道路を転がる力の自由体図は次のようになります。
次に、モータートルクの同等の力への変換は、次のようになります。
車速はニュートンの第2法則から求められます。
ここで、車の等価質量Meqは次の式で与えられます。
最後に、エンコーダーから見たモーター速度は次のとおりです。
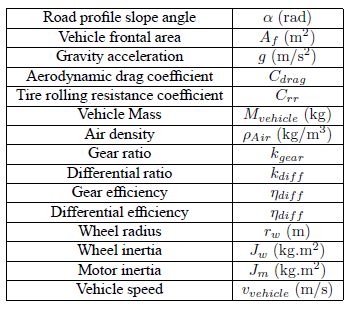
表2:車両パラメーター
2.5.Direct Torque Control(直接トルク制御)
直接トルク制御(DTC)の原理は、固定子の磁束の振幅と位置、および基準トルクと実際のトルクの間の誤差に応じて、適切な電圧ベクトルを選択することです。
この”State-of-the-art”な技術について、 詳細は[7]を参照してください。
図5は、固定子αβ軸平面のセクターを示しています。
図5:セクター - 固定子αβ軸平面
磁束オブザーバーは、(i)固定子電流の読み取り値、および(ii)スイッチゲートから再構成された固定子電圧に基づいて固定子磁束を計算します。
これに関する文献は数多くありますが、ここでは簡潔にするために、2つの文献を引用します[7], [8]。
コントローラは、OPAL-RT RT-XSGおよびXilinx R System Generatorソフトウェアを使用してOP4500 TargetPCのKintex 7 FPGAボードに実装します。図6をご参照ください。
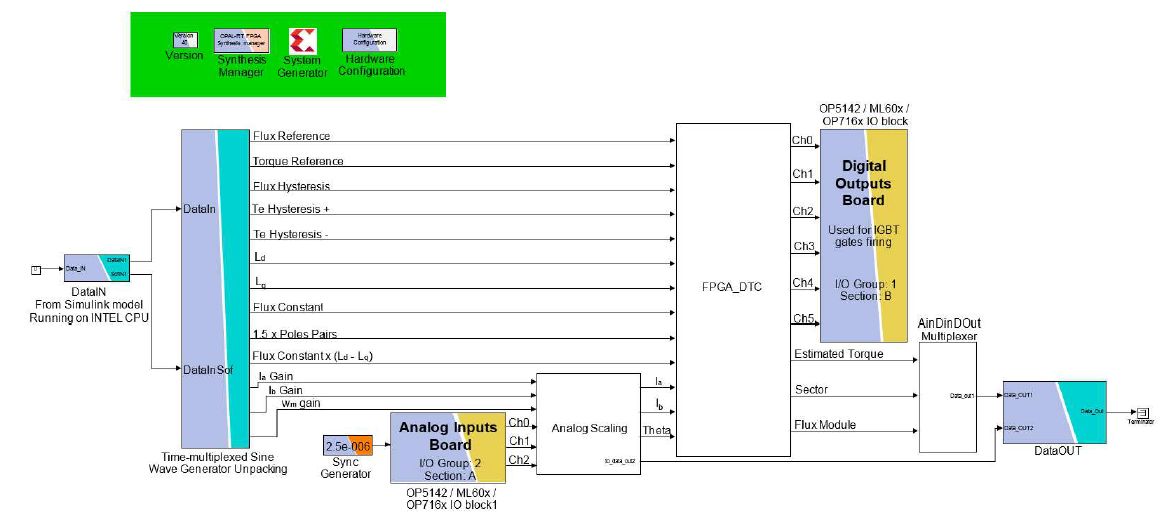
図6:OPAL-RTXSGおよびザイリンクスRSystemGeneratorで実装されたDTC
この様なブロック接続ベースのプログラミングツールを使用すると、FPGAでのコントローラーの実装が(HDLコーディングなどと比較して)大幅に簡素化できます。
最大スイッチング周波数は100kHzに設定されています。
3.リアルタイムHIL とPHILシミュレーション
シミュレーションは2つのステップで実行されます。
- 1. RT-LABソフトウェアと2台のOP4500リアルタイムシミュレータを使用したHIL / RCPリアルタイムシミュレーション。
最初のターゲットは車両全体(車両ダイナミック、パワーインバーター、モーター、バッテリーを含む)のシミュレーション専用で、2台目にはコントローラが実装されています。
- 2. Power-HILでは、バッテリーモデルがアンプと一緒に動作する実際のバッテリーに置き換えられる。
3.1.Hardware in the Loopシミュレーション
最初のターゲットにアップロードされるCPUモデルを以下の図7に示します。
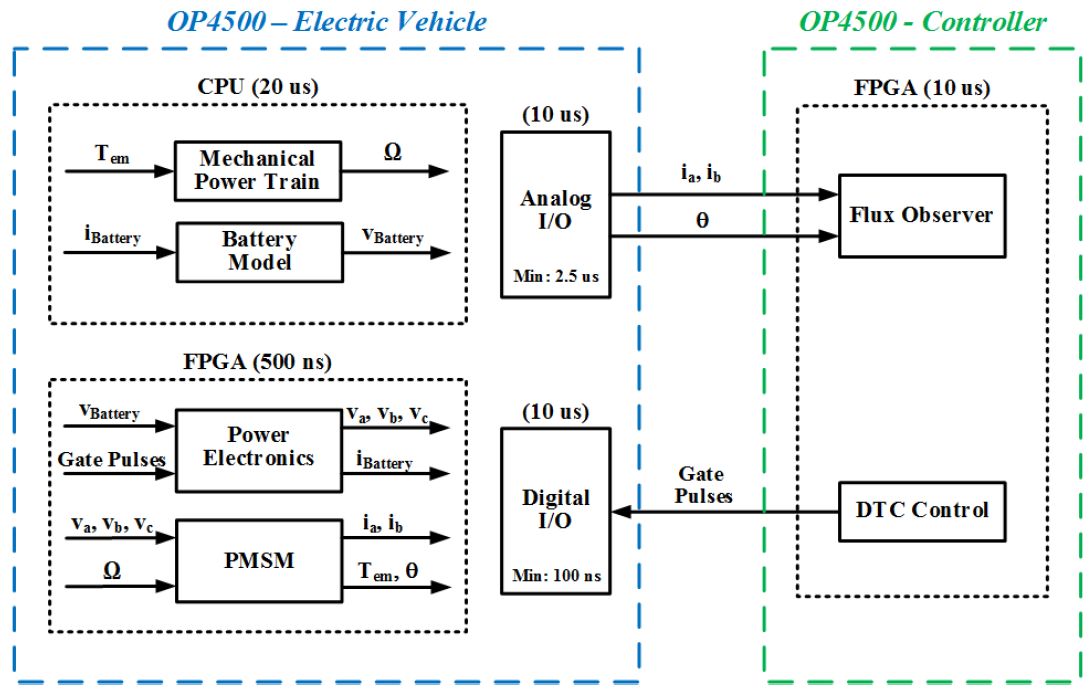
図7:HILリアルタイムシミュレーション
Dual PMSM Motors VDQ」および「eHSx64 CommBlk」ブロックは、PMSMモーターおよび2レベル三相インバーター回路の電気方程式をそれぞれシミュレートするため、500nsの制御周期でリアルタイムシミュレータFPGA上で実行されます。バッテリーと機械式パワートレインは20μsの速度で、リアルタイムシミュレータCPU上でシミュレートされます。
「アナログIO」サブシステムは、DTCコントローラーのリアルタイムシミュレータに送信されるアナログ出力、つまり、磁束推定に使用されるモーター電流IaとIbおよび電気ローター角度θeの監視を行います。
さらに、サブセクション3.2に示されているPHILシミュレーションに移行すると、「アナログIO」ブロックは、アンプに送信されるバッテリ電流と、アンプから受信されるバッテリ電圧を監視します。
最初のシミュレーションは、38秒で速度が80km / hに達するまで車両が加速し、その後39.5秒で8%の勾配を走行する場合に対応します。モーターのエンティティ、電流Ia、Ib、Ic、電圧Vab、Vbc、Vca、および車速と電磁トルクを図8に示します。ステーター磁束、つまりΨα、Ψβ、||Ψ||フラックスセクターと同様に図9に示されています。
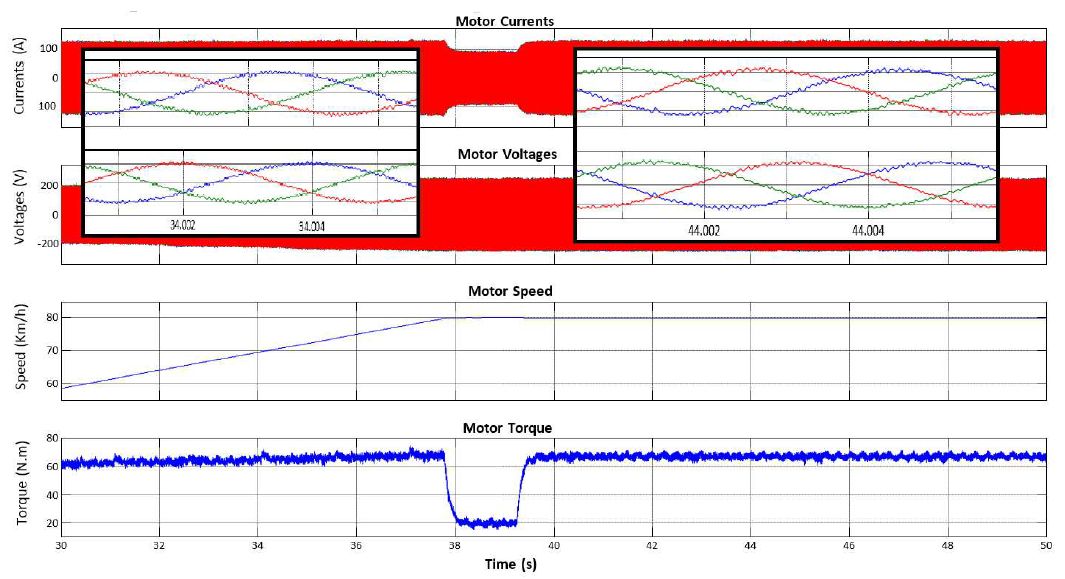
図8:モーターの電流、電圧、速度、トルク
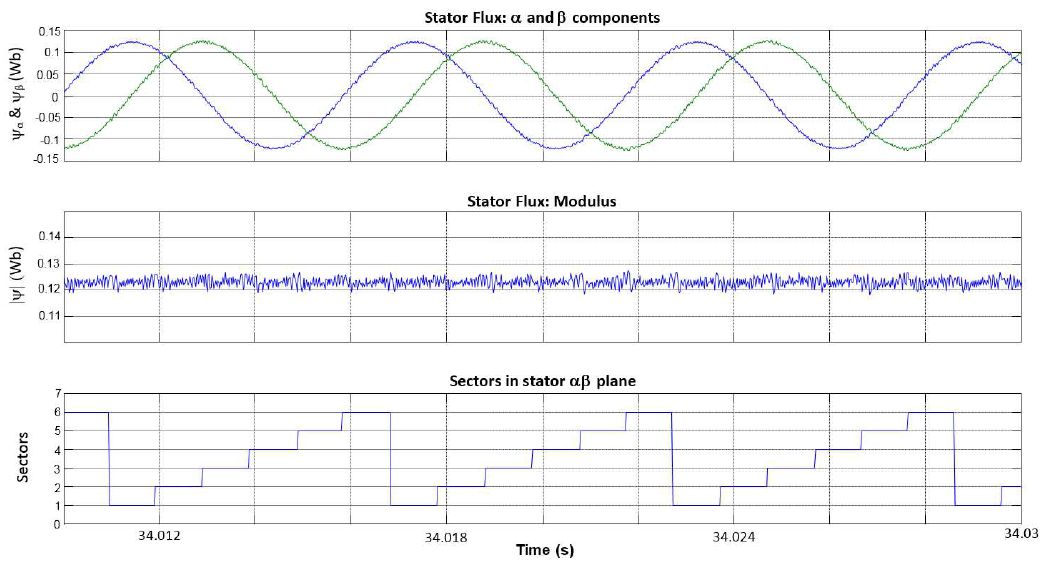
図9:ステーター磁束とセクター
2番目のシミュレーションは、速度が33.5秒で80km / hに達するまで加速し、35秒で50km / hに減速し始める場合に対応します。
図10には、以前と同じモーターエンティティが、バッテリーの電流と電圧とともに示されています。
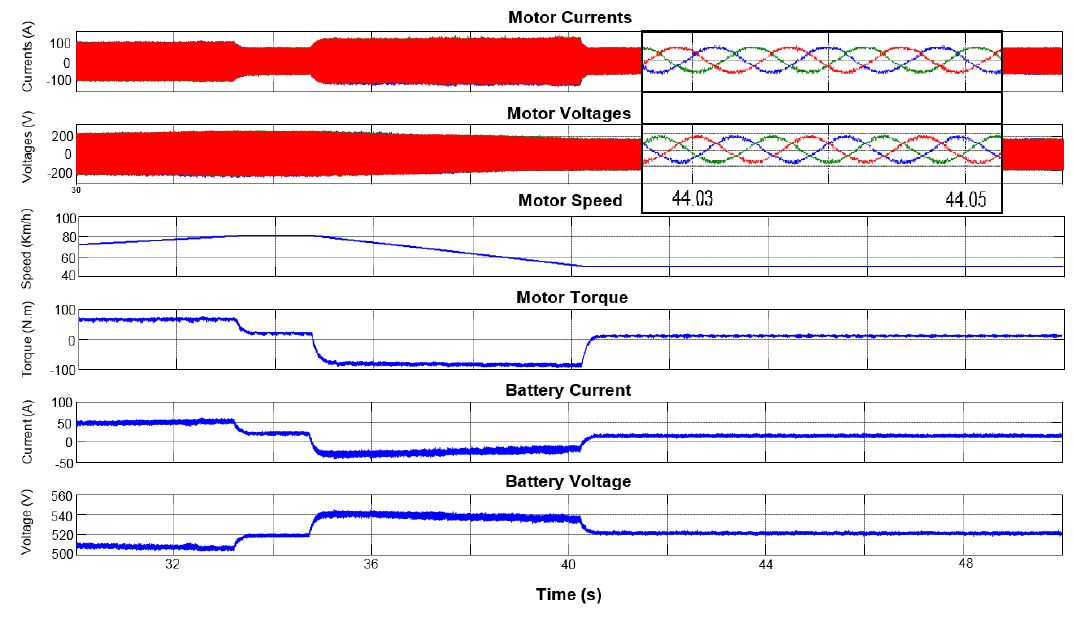
図10:モーターの電流、電圧、速度とトルク、バッテリーの電流と電圧
3番目のシミュレーションは、車両が80km / hの速度で加速しているときに31.8秒で障害が発生した場合に対応します。
モーターの電流と電圧、およびバッテリーの電流と電圧を図11に示します。
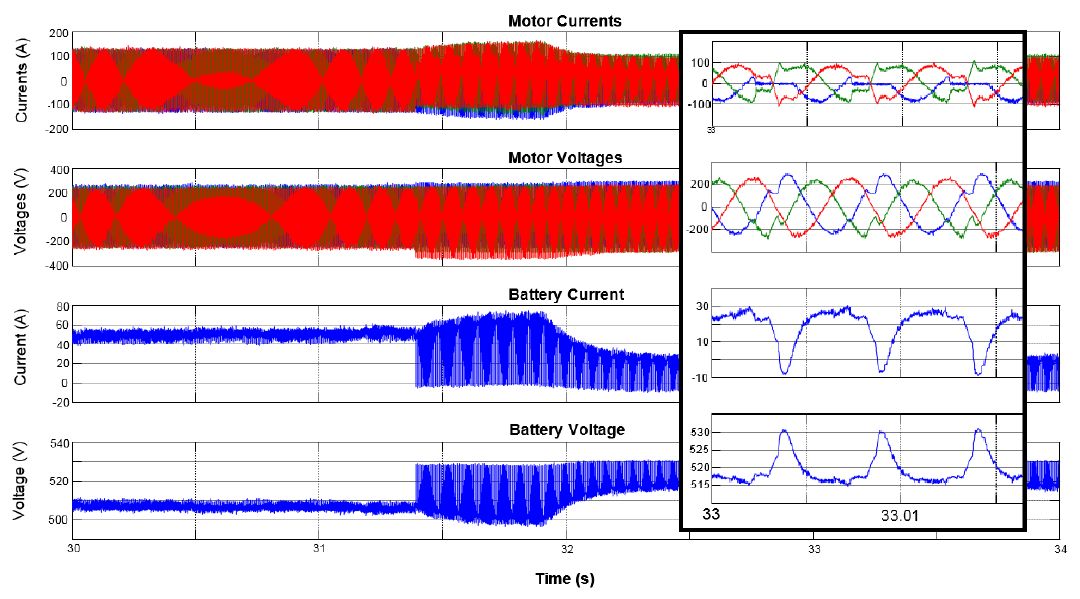
図11:モーターとバッテリーの電流と電圧
3.2.Power-HILシミュレーション
この設定では、バッテリーモデルが実機の物理バッテリーセルに置き換えられ、全体のバッテリーパックを構成するセルの数が乗算されます。
このPHILバッテリーシミュレーションでは、1つのパック内の不均一な温度は考慮されていないため、すべてのバッテリーセルが引き出される電流に対して同等の応答を示すと見なされます。
PHILシミュレーションの原理を図12に示します。
図1に示すように、電流増幅器は、リアルタイムシミュレータのアナログ出力によって駆動されます。このアナログ出力は、バッテリ電流から計算されます。シミュレータに返送されるバッテリ電圧は、実際のバッテリ電圧測定から取得されます。
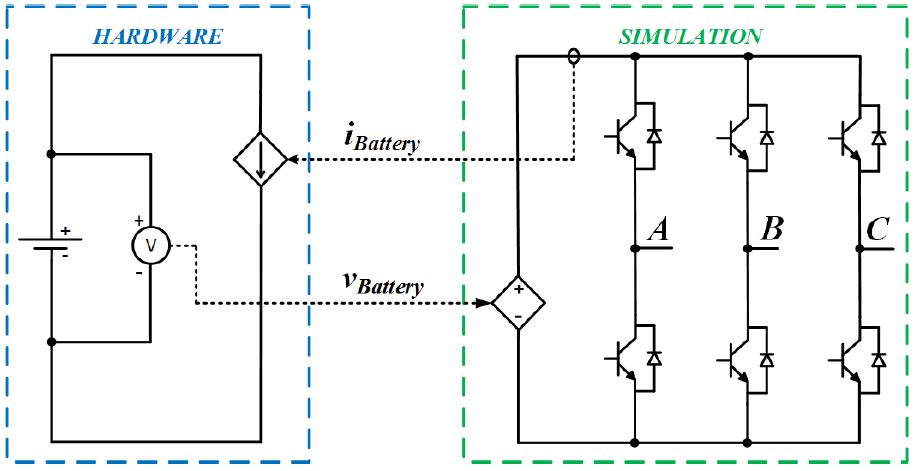
図12:PHILの原理-バッテリーの使用
図13は、HILおよびPHILシミュレーションから得られたバッテリー電圧、およびバッテリー電流と車速を示しています。
ここで注目すべき点は、速度変動に対する電流と電圧の応答が、予想されるバッテリーの充放電を担保している点です。
PHILとHILでの結果の違いは、HILではバッテリーパラメーターが一定であり、動作条件の変化を考慮していないのに対し、PHILでは実際に変化するバッテリーパラメーターのわずかな違いも考慮している。
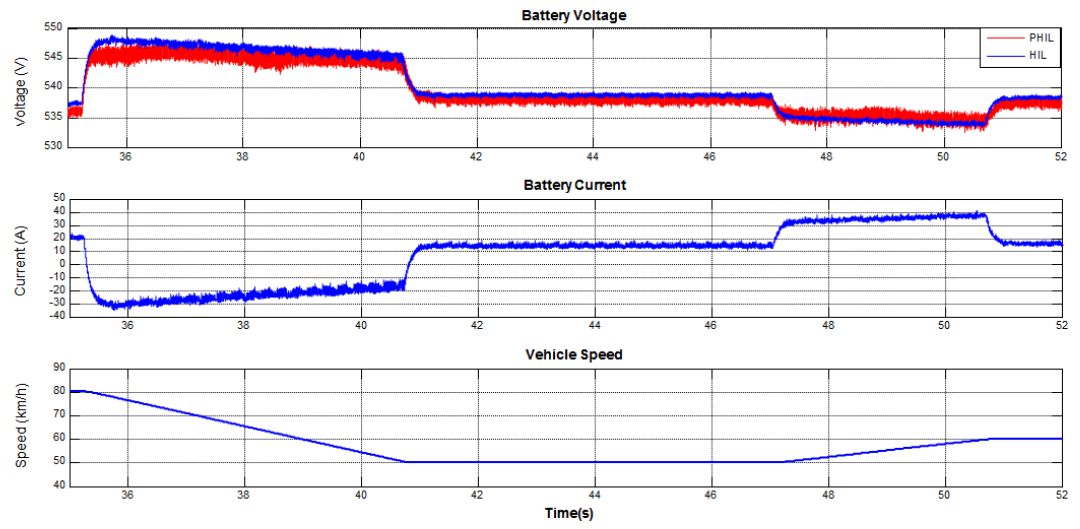
図13:HILおよびPHILのバッテリー電圧と電流およびモーター速度
図14は、31.9秒で引き起こされた障害を除いて、図13と同じPHILエンティティを示しています。
この障害は、インバーターの第1フェーズの上部IGBTを開いたままにすることで再現されているため、実際のバッテリーセルに対する障害の影響をテストしている可能性があります。
もちろん、安全面の理由から、実機バッテリーでの短絡テストは行われていませんが、バッテリーモデルは実機と違い安全面のリスクはありませんので、このテストをHILシミュレーションで行う事ができます。
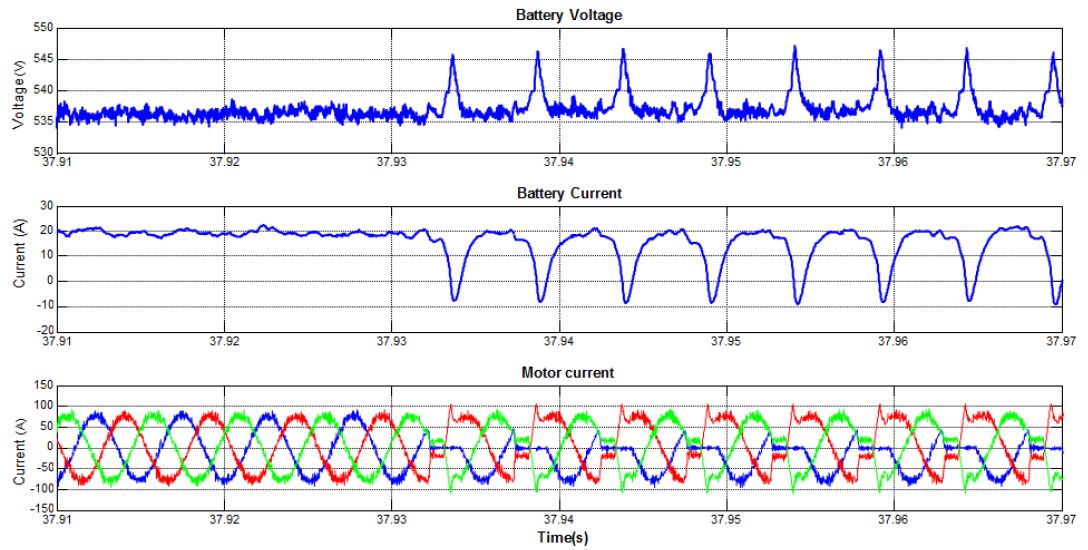
図14:PHILバッテリーの電圧と電流およびモーター電流
4.結論
本白書では、複雑なモータードライブの設計とテストのプロセスを加速し、市場投入までの時間を短縮するために、高度なパワーエレクトロニクスメーカーやR&Dセンターで現在使用されているHILおよびPHILメソッドについて説明しています。
200nsから500nsの範囲の制御周期でパワーエレクトロニクス・コンバーターをシミュレート可能な高速FPGA / CPUベースのリアルタイムシミュレータを使用して、再現性の高いHILとRCPによるテストが可能になりました。
HILコントローラーのテストは、プロトタイプまたは製品グレードのエンジン制御ユニット(ECU)ハードウェアに実装されているコントローラーと保護ロジックをテストする用途で必要となります。
HIL ECUテストにより、実際のハードウェアで実行するのが困難またはリスクのある定常状態、過渡状態、および障害状態でのコントローラーと保護システムのパフォーマンスを評価できます。
さらに、PHILモードで実機バッテリーを追加すると、HILでは数学モデルだったものが実機バッテリーに置き換えられるため、シミュレーションの精度が向上します。
これにより、バッテリーのモデルを徹底的にテストしてチューニングする必要が無くなるため、開発時間とコストを節約できます。
実際のバッテリーを使用することにより、バッテリー性能の周囲温度の変動を無視した場合、コントローラーのプロトタイピングとテストの精度が向上します。
PHILを使用して、様々な動作条件で、様々なタイプのバッテリーモデルを、正確に識別することができます。
これらの検証済みバッテリーモデルは、複数のエンジニアリングチームがHILシミュレーション(実機バッテリーなし)に使用して、様々なタイプのバッテリーと動作条件を使用して、コントローラー、モーター、カーダイナミクスの様々な側面を同時に開発・テストすることができます。
検証されたバッテリーモデルを使用するHILシミュレーションを使用した同時開発により、開発とテストの時間、および市場投入までの時間が短縮されます。これは、フルパワーで動作する実機バッテリーを含む、高価な実験設備の使用頻度を減らすことができるためです。
参考文献
[1] C. Dufour, S. Cense, T. Yamada, R. Imamura and J. Blanger, “FPGA Permanent Magnet Synchronous Motor Floating-Point Models with Variable-DQ and Spatial Harmonic Finite-Element Analysis Solvers", Proc. 15th International Power Electronics and motion Control Conference, EPE-PEMC 2012, Novi Sad, Serbia, Sept. 4-6, 2012.
[2] Y. Inaba, S. Cense, T. Ould-Bachir, H. Yamashita and C. Dufour, “A Dual High-Speed PMSM Motor Drive Emulator with Finite-Element Analysis on FPGA chip with Full Fault Testing Capability”, Proc. 14th European Conference on Power Electronics and Applications, EPE 2011, Birmingham, UK, Aug. 30Sept. 1st, 2011.
[3] P. Pejovic and D. Maskimovic, “A Method for Fast Time-Domain Simulation of Networks with Switches", IEEE Trans. Power Electronics, vol. 9, No. 4, July 1994.
[4] C. Depature, P. Sicard, A. Bouscayrol, W. Lhomme and L. Boulon, “Comparison of Backstepping Control and Inversion-Based Control of a Range Extender Electric Vehicle”, Proc. IEEE Vehicle Power and Propulsion Conference, VPPC 2014, Coimbra.
[5] J. Jaguemont, L. Boulon and Y. Dub, “Characterization and Modeling of a Hybrid-Electric-Vehicle Lithium-Ion Battery Pack at Low Temperatures”, IEEE Trans. Vehicular Technology, vol. 65, No. 1, pp. 1-14, Jan. 2016.
[6] M. Lemaire, P. Sicard and J. Belanger, “Prototyping and Testing Power Electronics Systems Using Controller Hardware-In-the-Loop (HIL) and Power Hardware-In-the-Loop (PHIL) Simulations”, Proc. IEEE Vehicle Power and Propulsion Conference, VPPC 2015, Montreal, QC.
[7] P. Vas, Sensorless Vector and Direct Torque Control, Oxford University Press, 1998.
[8] C. Bian, S. Ren and L. Ma, “Sensorless DTC of Super High-Speed PMSM”, Proc. IEEE International Conference on Automation and Logistics, Jinan, China, Aug. 18-21, 2007
著者
Danielle Sami Nasrallahは、2000年と2002年にそれぞれ、レバノンのベイルートにある「Ecole sup´erieure d'ing´enieurs de Beyrouth」から、電気機械工学のエンジニアの卒業証書と電気工学のDipl?ome d'´EtudesApprofondiesを取得しました。 2006年にカナダのQC、モントレールにあるマギル大学で機械工学の博士号を取得。
彼女の博士課程の研究中、彼女はロボティクスデザインで制御およびロボティクスエンジニアとしてパートタイムで働いていました。2006年から2007年に制御およびアプリケーションエンジニアとしてMetaVisionSystemsに異動しました。
2008年に彼女はキングストンのロイヤルミリタリーカレッジの電気学部に助教授として加わり、2009年にベイルートアメリカン大学の客員助教授でした。
2010年から2014年まで、制御およびシステムエンジニアリングのコンサルタントとして働いていました。
2014年にOPAL-RTTechnologiesに入社し、現在は電気アプリケーションとシミュレーションの専門家です。
彼女はコンコルディア大学の機械産業工学科の講師であるため、学界ともつながりを持っていました。
Michel Lemaireは、カナダのQCにあるUniversit´e du Qu´ebec `a Trois-Rivi`eres(UQTR)で電気工学の学士号を取得し、2014年に電気エネルギー工学研究所で電力システムを専門としています。 現在、同じ分野で修士号を取得しており、Opal-RTTechnologies-NSERC-FRQNT産業イノベーション奨学金の支援を受けています。
過去の作業には、自動車機器のハードウェアインザループ(HIL)、パワーハードウェアインザループ(PHIL)シミュレーションに基づくモーターエミュレーションおよびグリッドエミュレーション、および4象限増幅器の設計が含まれます。
彼の研究対象には、Power Hardware-in-the-loopおよびHardware-in-the-loopシステム、リアルタイムシミュレーション、制御、およびパワーエレクトロニクスが含まれます。

社長兼R&Dディレクターとして、Jean B´elanger氏は、Opal-RTテクノロジーのビジョンと企業の方向性を定義し、研究開発への取り組みを主導しています。 1997年にOpal-RTを共同設立する前は、Hydro Quebecで25年間働いており、765kVのジェームズベイ送電システムの主要な設計エンジニアの1人でした。
1978年、彼はHydro-Quebecのシミュレーションサービスの商業化を世界中で主導し、Hydro-Quebecの電気ネットワークシミュレーターを設計し、販売促進に貢献しました。
10,000 ft2の面積を占め、1400万ドルの費用がかかるこのユニークなシミュレーション施設は、依然として世界最大かつ最も洗練されたリアルタイムの大規模電気ネットワークシミュレーターです。
B´elanger氏は、電気ネットワークシミュレータの販売も推進しました。 1993年から1996年にかけて、彼はいくつかの大規模シミュレーターを設計し、三菱、日立、東芝、EPRI(中国)を含む世界中の多くの大手企業に納入しました。その後、彼はリアルタイムシミュレーション技術の商業化を専門とするHydro-Quebecの子会社であるTEQSIMを共同設立しました。
彼の卓越したキャリアの過程で、ミスター。 B´elangerは積極的に参加し、社長を務めました。
多数のACE(Association Canadienne de l'´Electricit´e)およびCIGRE(Conf´erence Internationale)でdes Grands R´eseaux´Electriques)イベント。 B´elanger氏は、「Ecole Polytechnique de Montr´eal」で電力システムの修士号を取得した電気技師(Universit´e Laval、Qu´ebec)です。
彼は最近、会員数が250人に制限されている組織であるCanadian Order of Engineersのメンバーに指名されました。

Lo¨?c Boulonは、2006年にリール大学(フランス)で電気および自動制御工学の修士号を取得しました。その後、フランシュコム大学(フランス)で電気工学の博士号を取得しました。 2009年と2010年には、University du Qu´ebec `a Trois-Rivi`eres(UQTR、カナダ)でポスドク研究員を務めました。
2010年以来、彼はUQTRの教授であり、水素研究所で働いています。彼の仕事は、マルチフィジックスシステムのモデリング、制御、エネルギー管理を扱っています。
彼の研究対象には、ハイブリッド電気自動車、エネルギーおよび電源(特に寒冷時のバッテリー)、および燃料電池システムが含まれます。
彼は、査読付きの国際ジャーナルや国際会議で100を超える科学論文を発表しています。
2015年、Lo¨?cBoulonは、モントリオール(QC、カナダ)で開催されたIEEE-Vehicular Power and PropulsionConferenceの議長を務めました。
Lo¨?cBoulon教授は、IEEE Vehicular Technology SocietyのVPモータービークルであり、将来のビークルのエネルギー源に関するカナダリサーチチェアの保持者です。

お問い合わせ先
 株式会社 NEAT
株式会社 NEAT
愛知県名古屋市千種区池下1-11-21
TEL:052-764-3311FAX:052-764-3632
Opal-RT Technologies,Inc.
1751 Richardson, Suite 1060 Montreal, Quebec, Canada, H3K 1G6
TEL:+1-514-935-2323 FAX:+1-514-935-4994
* 記載の会社名および製品名は、各社の登録商標および商標です。