

未来を牽引する自動運転車シミュレーション

OPAL-RTのシステムは、テストベンチをシミュレーションプラットフォームに移すことで、自動運転車をテストする際の障害を克服します。
OPAL-RTのシステムは、データ融合やディープラーニングから、LIDARなどの新しいセンサーに至るまで、車両に導入される新技術を統合出来る柔軟性を備えています。
最も重要な分野にイノベーションを
OPAL-RTは、Fortune誌の「世界の主要500社」に名前を連ねる企業、国際的な研究機関、大学、新進の起業家など様々なお客様に対して、エントリーレベルのシステムから、先進運転支援システム(ADAS)や自動運転(AD)等 最も需要の高い分野向けの、最先端の製品まで、広範なサービスラインを提供しています。


プロジェクトのすべてにOPAL-RT
OPAL-RTは、様々なシミュレーション手法(X-In-the-Loop)を提供し、開発サイクルのすべての段階で検証作業を加速します。
自動運転には、車両、駆動装置(エンジン/モータ)、制御装置(ECU)、センサー、運転者、道路環境など多くの要素が関係しますが、シミュレーション手法により、リアルタイムシミュレータで模擬する要素と実機を用いる要素が異なってきます。
自動運転には、車両、駆動装置(エンジン/モータ)、制御装置(ECU)、センサー、運転者、道路環境など多くの要素が関係しますが、シミュレーション手法により、リアルタイムシミュレータで模擬する要素と実機を用いる要素が異なってきます。
Model-In-the-Loop (MIL) / Software-In-the-Loop (SIL)
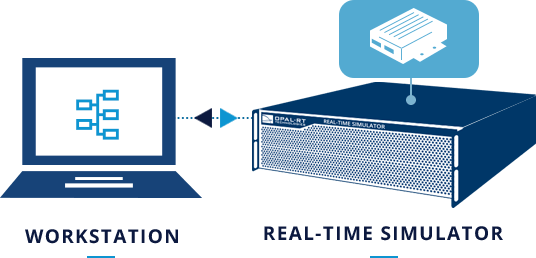
- シミュレータで模擬: 車両ハードウエア(ECU モーションコントローラ等)
- 実機: 実機無し
- 目的: モデル・コード・プラットフォームの検証
Hardware-In-the-Loop (HIL)
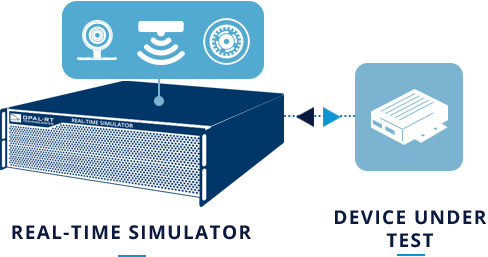
- シミュレータで模擬: 車両全体と環境
- 実機: 車両ハードウエア(ECU モーションコントローラ等)
- 目的: 車両ハードウエアのテスト
Driver-In-the-Loop (DIL)
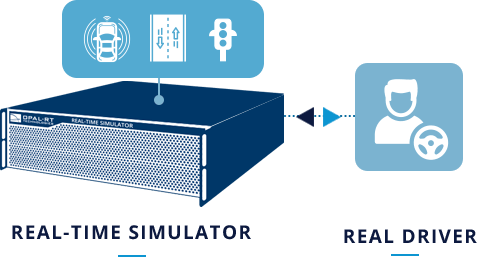
- シミュレータで模擬: 車両全体と環境
- 実機: ドライバー(ヒト)
- 目的: 自動運転車の開発に関するドライバーのフィードバック収集
Vehicle-In-the-Loop (VIL)
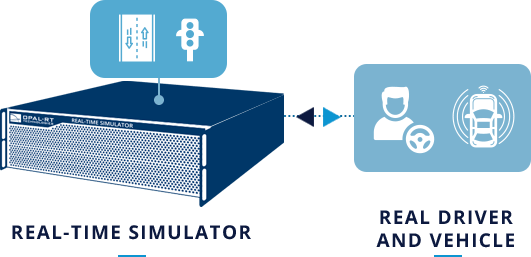
- シミュレータで模擬: 環境
- 実機: 運転者と自動運転
- 目的: 自動運転車に乗っているときの人間の行動と反応を研究
ウェビナー|ADAS/ADシステムの開発 テスト 検証
これらのウェビナーでは、テストベンチをシミュレーションプラットフォームに移行することで、自動運転車の制御やADAS全体をテストする際の障害を克服する、リアルタイムシミュレーションの役割について詳しく説明しています。デジタルツインを使用してADASシステムを開発する方法
自動運転車の構築と検証にデジタルシミュレーションを使用する方法
自動運転ソリューションのハイライト

センサーとデータの融合
カメラ、GNSS、LiDAR、レーダーなどの複数のセンサーをシミュレートして、3D環境での距離、速度、その他のデータを推定します。さらに、予測や決定を行うために、これらのさまざまなデータソースを組み合わせます。
ディープラーニング
ディープラーニングモデルをシミュレートすることで、リスクを軽減し、市場投入までの時間を短縮します。OPAL-RTのソリューションは、車両が歩行者、環境標識、物体を読み取って検出する際の精度を向上させるのに役立ちます。
通信プロトコル
CAN / CAN-FD / CANopen、Lin、Automotive Ethernetなどの業界標準の通信プロトコルをエミュレートし、可能な限り現実的なリアルタイムシミュレーションを実行します。オールインワンのテスト環境

RT-LABは、モデルが現実の世界と対話しながら、仮想環境での自動運転車の完全な設計、統合、テスト、および検証を可能にするオールインワンのテスト環境です。
コスト、市場投入までの時間、およびプロジェクトのリスクが軽減されます。
RT-LABは、MATLAB /SimulinkR、CARLA、PyTorchなどと完全に統合されており、エンジニアが複雑さに関係なく、アプリケーションを迅速に開発および検証できる理想的なツールです。
コスト、市場投入までの時間、およびプロジェクトのリスクが軽減されます。
RT-LABは、MATLAB /SimulinkR、CARLA、PyTorchなどと完全に統合されており、エンジニアが複雑さに関係なく、アプリケーションを迅速に開発および検証できる理想的なツールです。
ソフトウェアのハイライトと利点
特徴
RT-LABは、以下を可能にする堅牢なフレームワークです。- ステップ・バイ・ステップデバック
- 大量データ記録
- テストシナリオのカスタマイズ
- シミュレーション中に 入力、出力、内部信号にアクセス可能
協調シミュレーション(Co-simulation)
より良いモデル統合は、より良いパフォーマンスを意味します。RT-LABには、さまざまなプログラミング言語やプロバイダーのモデルを簡単に統合できる協調シミュレーションツールボックス(Orchestra)も含まれています。
デジタル資産
CARLAを使用して、オープンなデジタル資産(都市のレイアウト、建物、車両)を探索します。センサー群の柔軟な仕様、環境条件、すべての静的および動的アクターの完全な制御、マップ生成などをサポートします。
機械学習(マシンラーニング)
研究プロトタイピングから本番展開へのパスを加速するためのツールとライブラリの豊富なエコシステムをユーザーに提供する機械学習フレームワークであるPyTorchを使用して深層学習モデルのパフォーマンスを向上させます。OPAL-RTの自動運転車両ハードウエアプラットフォーム

OPAL-RTは、自動運転車の設計、統合、テスト、検証に取り組むエンジニアや研究者の高まるニーズを満たすために作成された、費用対効果が高く、高性能なデジタルシミュレーターOP5042XGを提供します。
ハードウエア概要
- プロセッサー: 2x Xeon Silver 4112 (2.60GHz)
- グラフィックカード: 1x MSI GeForce RTX 3060
- 接続仕様: Ethernet, RS-232, VGA, 2x USB 2.0 ports
- 拡張機能: 6 PCI Express slots
- サイズ: 16.93″ (W) x 6.93″ (H) x 18.43″ (D)
ユーザー能力の拡大
Autonomous Vehicle Platform(OP5042XG)は、I/Oまたは通信ネットワークの量を拡張するためのさまざまなリアルタイムシミュレータープラットフォームと互換性があります。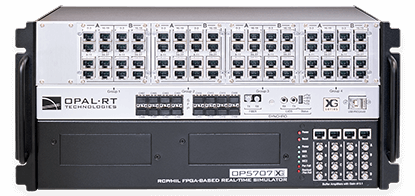
OP5707XG I/Osを介して実デバイスを接続します。
OP5707XGは、比類のないハイエンドIntelRマルチコアプロセッサ、FPGAパフォーマンス、およびトップレベルの要件を満たす光接続を提供します。
OP5707XGは、比類のないハイエンドIntelRマルチコアプロセッサ、FPGAパフォーマンス、およびトップレベルの要件を満たす光接続を提供します。
I / O、カメラ、GNSS、LiDAR、レーダーなどの複数のセンサーを接続出来ます。
OPAL-RTシステムは、自動テストおよび自動測定アプリケーション向けのさまざまなNIのPXIおよびPXIExpressシャーシと互換性があります。
OPAL-RTシステムは、自動テストおよび自動測定アプリケーション向けのさまざまなNIのPXIおよびPXIExpressシャーシと互換性があります。
協調シミュレーション
RT-LABの協調シミュレーションツールボックスであるOrchestraは、すでにテストされインテリジェントな車両ソリューション群に統合されているシミュレーションツールが使用出来ます。
OPAL-RTは、より多くのカスタマイズ要求のために、さまざまなプログラミング言語、プロバイダーからのモデルを統合し、ユーザーのシステムの機能を拡張する専門知識のサポートを提供します。
OPAL-RTは、より多くのカスタマイズ要求のために、さまざまなプログラミング言語、プロバイダーからのモデルを統合し、ユーザーのシステムの機能を拡張する専門知識のサポートを提供します。



