

TRANSCANADAハイウエイにおけるEV用高速DC充電システム開発とOPAL-RT

アプリケーション
EV充電ステーション関連製品
- OPAL-RT FPGA-Based Power Electronics Toolbox (eHS)
- NI LabVIEW
- NI cRIO-9082
シミュレーションタイプ
- Hardware-in-the-Loop (HIL)
- Rapid Control Prototyping (RCP)
はじめに

その一方でEVはどんどん普及しています。求められているのは、ガソリン車に少しでも近づける20?30分という急速な再充電でした。
このソリューションは、既存のインフラがこの課題に対応するように設計されていないため、電力供給の速度または量の点で対応が遅れています。
カナダにおける意欲的なEVインフラプロジェクトの1つに、エネルギー貯蔵会社eCAMIONと、トロント大学の応用パワーエレクトロニクスセンター(CAPE)が行った 世界でも最も長い高速道路の一つである TransCanada Highway:(7821km)上に設置されたDC Fast-Charging System (DCFCS)があります。
課題
高速充電の概念そのものが、短時間で大量のエネルギーを消費することを意味します(帯域幅またはスループットの課題)。トロント大学のReza Iravani教授とCAPEの彼のチームは、大容量バッテリーに電力を蓄えたり放電したり、既存のインフラによって電力を補充することができる新しいモデルを検討しました。
これらのローカルバッテリーストレージユニットは、DC急速充電システムが電気インフラへの影響を軽減できる大きなシステムの一部になります。
これではスループットの問題は解決できそうですが、エンジニアリング上の課題は残りました。
「電気充電ステーション(直訳は電気スタンドとなるが 電気スタンドは日本では別の意味で使われている)というアイディアは、EVを充電するために大規模なバッテリーシステムを使用することです」
「ドライバーはガソリンスタンドのような大型バッテリーから数分でEVを充電し、これらの固定バッテリーは既存のグリッド容量に基づきグリッドから徐々に充電されます。」
とIravani教授は述べています。

目的
CAPEのチームは、チャレンジの最初の決定的な部分として、ローカルの大容量バッテリーストレージシステムとともに、DC FastCharging System(DCFCS)の制御アルゴリズムを開発する必要がありました。彼らは、ナショナルインスツルメンツのリアルタイムシミュレーション用組み込みコントローラ(EC)であるcRIO-9082に制御アルゴリズムを使用しました。
バッテリーストレージシステムに関しては、トロントに拠点を置くeCAMIONと提携しました。eCAMIONは、既存のインフラでのEV展開に固有な問題のソリューション開発に関する専門知識を持っています。
また 高速充電器として「新しい充電ステーションはレベル3の充電器を使用するために装備され、通常は電気自動車を約30分で完全に充電できる480ボルトシステムを使用する」 というパワーエレクトロニクスモデル(急速充電器、パワーエレクトロニクスコンバーターの構成、コントローラー設計の微調整、60 kWプロトタイプによる完全な開発)をシミュレーションで行うことにしました。
2つの急速充電シーケンス(1つはバッテリーから車へ、もう1つはグリッドからバッテリーへ)が必要であるため、CAPEのチームは2つの充電器を直列に接続し 、cRIO-9082上でローカルコントローラー(LC)を実装して、より高い充電電圧を達成する必要がありました。
さらに、NIのcRIO-9082上でグリッドインターフェイスのAC / DCコンバーターのローカルコントローラーを(HILシミュレーションを介してリアルタイムで)開発し、テストすることにしました。
最後に、ステーションのローカルコントローラーを調整する監視制御(SC:Supervisory Control)を開発しました。
それぞれの新しいステーションは、大型リチウムイオン電池と複数のコンセントを使用するエネルギー貯蔵システムで構成され、複数の車を一度に充電できるように設計されました。
ステーションはレベル3充電器を使用でき、通常は約30分で電気自動車を完全に充電できる480ボルトシステムを使用します。
家庭や駐車場でよく見られるレベル2の充電器は240Vシステムを使用し、約8?10時間で車両を完全に充電します。
新しい充電ステーションはレベル3充電器を使用でき、通常は電気自動車を約30分で完全に充電できる480ボルトシステムを使用します。
ソリューションと開発
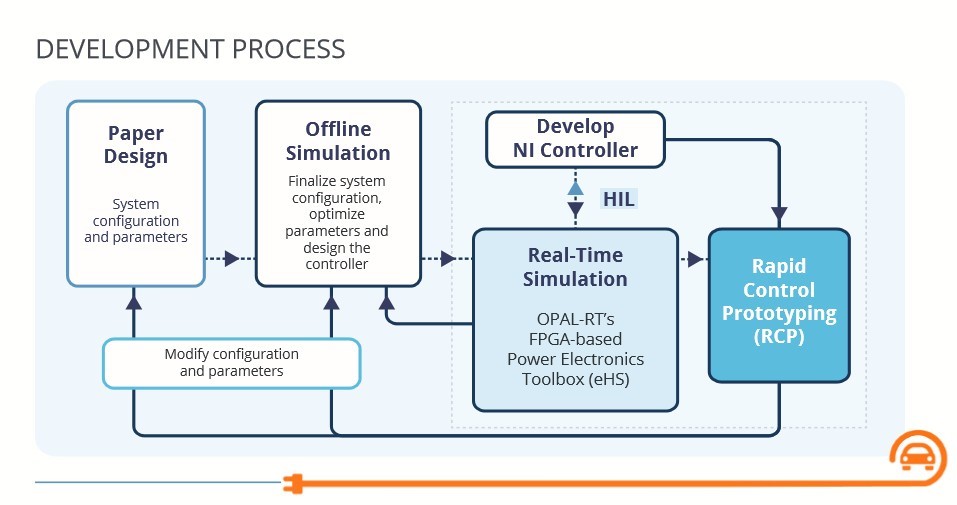
システム構成とパラメーターを決定するために、机上で開発プロセス検討を開始した後、CAPEのチームは、構成の最終決定、パラメーターの最適化、コントローラーの設計のためにオフラインシミュレーションに進みました。その後、コントローラのリアルタイムシミュレーションをする為、OPAL-RTの FPGAベースパワーエレクトロニクスツールボックス(eHS)の活用に移りました。
開発プロセス
充電ステーション 3台の充電ユニット
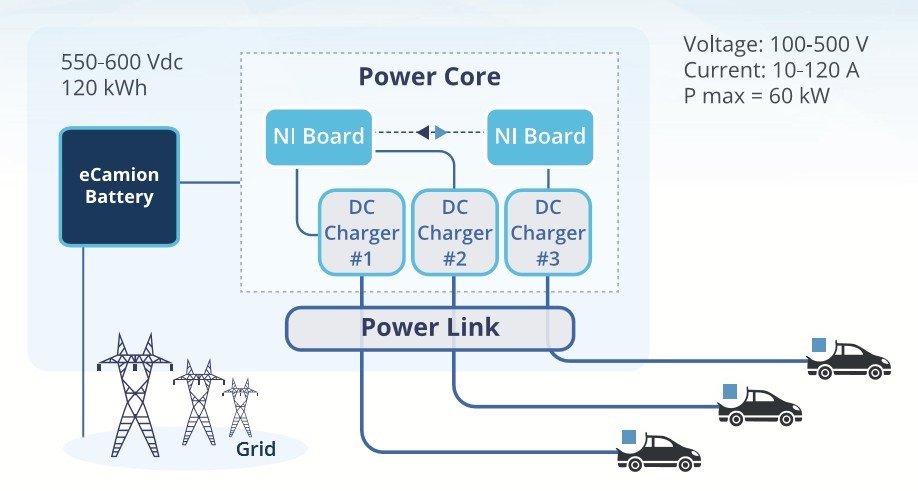
充電ステーション 3台の充電ユニット

最終製品はULとESA対応
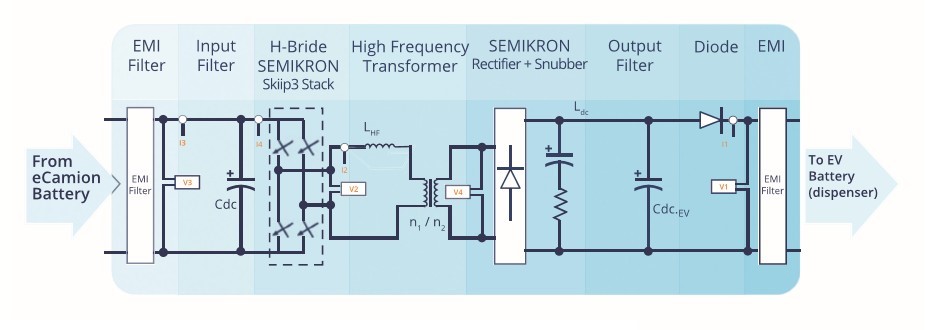
コンバーターは最終的に2年未満(2018年1月から2019年6月)で開発され、その構成は次のとおりです。- EV側でシリアル/パラレル構成可能な絶縁DC-AC-DCコンバータ
- 出力フィルターとマグネティックスのサイズを縮小し、スイッチング周波数10 kHz
- ソフトスイッチング条件を提供する位相シフトゲーティング制御戦略
- フロントエンドHブリッジとEVエンドのダイオード整流器からの一方向の電力の流れ
結論

OPAL-RTのFPGAベースパワーエレクトロニクスツールBox eHSが開発のすべてで使用されました。
- 開発プロセスの迅速化
- 開発コストの削減
- 高電圧および高電流でのシステム開発に固有の安全性リスクの軽減
OPAL-RTは、FPGAベースのPower Electronics Toolbox(eHS)を通じて、世界中で初めての野心的なEVインフラプロジェクトの中心的な役割を果たしました。



