JMAG-RT
オプション・ソルバー

これは非常に精密なリアルタイムモデルが作成できると同時に、時間の削減となります。
モデルはCPUもしくはもっとパフォーマンスを上げられるFPGA上で動作します。
- モータモデルをスタンダードのDQモデルよりもっと高精度で動作させる
- ロータの非対称性の影響をシミュレート
- 位相ドメインに関わる故障状況のシミュレート
- スイッチングパワーインバータモデルを含む
- 詳細なモデルの実行時の膨大な時間を削減できる
- 高速プラットフォームFPGA上でのシミュレーション
- FPGAを使いJMAGモデルを250nsecで実行できるOPALのe DRIVEsim ターンキーパワーエレクトロニクスシミュレータ
- センサレスコントロールや高精度モータに求められるその他の制御方式が検証可能
- 高精度のモデルとそれに合ったシミュレーションステップタイム
- eDRIVEsimの FPGA を使用したFEAベースのモデル(1μsecのタイムステップの実行)
- 2レベルもしくはマルチレベルのVSCパワーインバータモデル
- ゲート信号が入力されてからモータ電流が出力されるまでの1.3μの遅れを正確にテスト
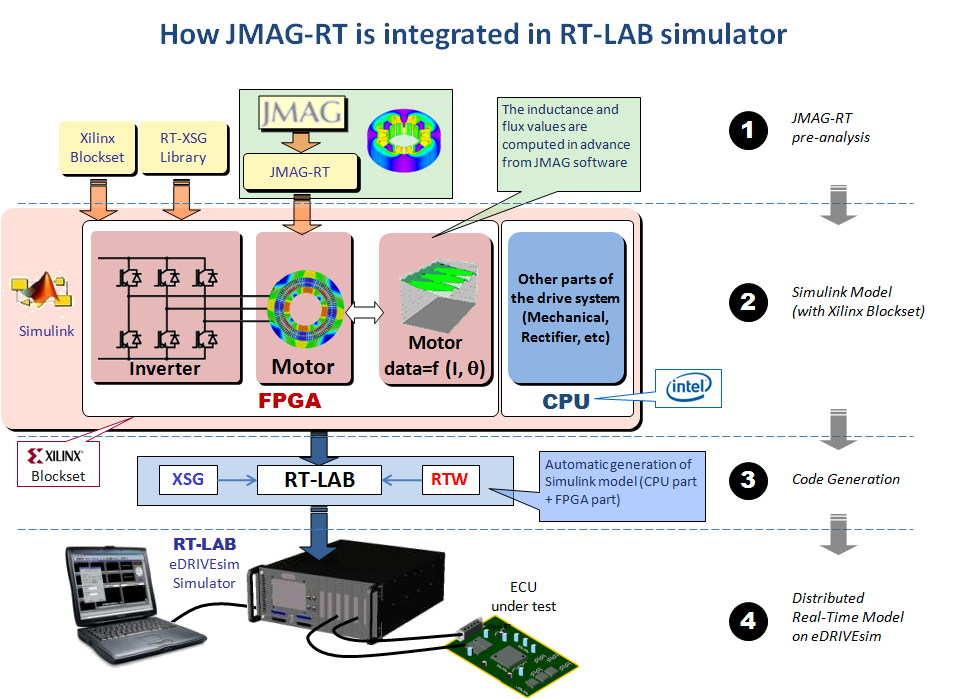
RT-LAB.JMAGは著名な機械電気の設計や開発用シミュレーションソフトウエアJMAGの開発元であるJSOLと共同で開発したソフトウエアモジュールです。
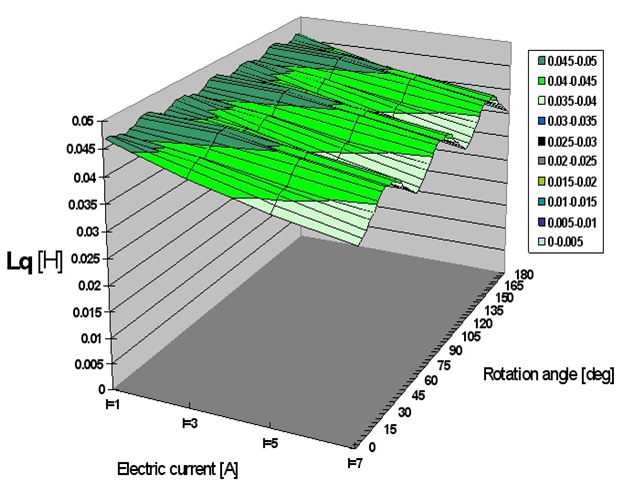
RT-LAB.JMAGはFEMの手法を用いて生成されたインダクタンスや逆起電力のデータを用いモータモデルをリアルタイムに実行するために設計されたツールです。
FEA手法は古典的なDQモデルでは対応が出来ない 非正弦波フラックスや電流によっておこされるモータ構成の非対称性の問題に対応が可能です。
スペースとコストの制限を持つハイブリッド車の高速モデルのシミュレーションには非常に重要です。
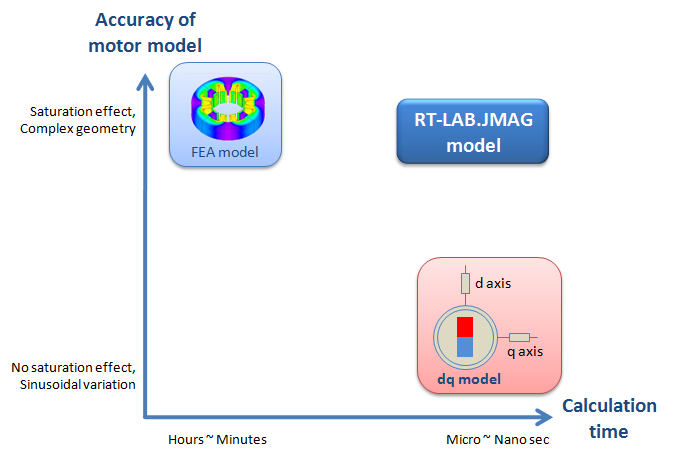
先進的なモータのリアルタイムシミュレーションでエンジニアが当面する最も重要な問題はモデルの精度とシミュレーションの時間ステップの関係です。
一方で簡単なPark 2軸モデルはモデルの精度を高めるにはそれなりの進んだモータ制御方法が必要でほとんどのHILSテストには充分です。
例えば ある種のPMSMモデルドライブは非常に高いコギングレベルを持っており 簡単に認識することは難しいです。
またあるときにはエンジニアはセンサレスコントロールのようなインダクタンスの種類が豊富な精度の良いモデルを要求するかも知れません。
JMAG-RTとRT-LABの構成から生じるFEAベースのリアルタイムシミュレーションはこれらに道を広げます。
RT-LAB.JMAG'のパワフルなコード最適化やルックアップテーブルで FEAベースのPMSMドライブはCPUベースで20μsecで動作します。
eDRIVEsim'の FPGA ボードを使った場合は 250nsecのタイムステップを実現します。
結果は標準のDQモデル オフラインJMAGモデルとリアルタイムモデルが上に表示されています。
DQモデルではトルクの結果が平均値になっていますが JMAGとリアルタイムモデルではトルク歪がシミュレートされています。
これらの非常に精度良いモデルはPentiumCPUを使用し時間ステップ10μから20μでリアルタイムシミュレーションされています。
FPGAチップを使った場合は高速のPMSMモータでも250nsecでシミュレートできます。