〒464-0067
名古屋市千種区池下一丁目11番21号
サンコート池下ビル2階
TEL:052(764)3311 FAX:052(764)3632
会社概要
導入分野
製品情報
新着情報
採用情報
サポート情報
お問い合わせ
モデルベース開発
ホーム
>
WWW.NEAT21.CO.JP
> モデルベース開発
XMBD
シミュレーションアクセラレータ
SIL|ソフトウェア・イン・ザ・ループ
REALTIME
RCP|ラピッド・コントロール・プロトタイピング
モデルベース開発の拡張(XMBD)|株式会社NEAT
P-HIL|パワーHIL
OPAL-RTイベント
OPAL-RTコラム
OPAL-RT TECHNOLOGYについて|株式会社NEAT
MIL|モデル・イン・ザ・ループ
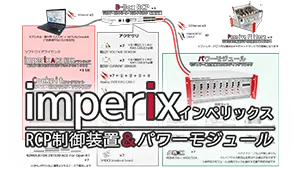
IMPERIX
HILS|ハードウェア・イン・ザ・ループ
EGSTON POWER ELECTRONICS
超小型データロガー
コラム
OPAL-RT
OPAL-RT Technologyについて
OPAL-RTのHILシステムの特徴
MBD(モデルベース開発)
HIL|ハードウェア・イン・ザ・ループ
PHIL|パワーHIL
Power HILプロセスへの理解
RCP|ラピッド・コントロール・プロトタイピング
リアルタイムMIL|ループバックテスト
SIL|ソフトウェア・イン・ザ・ループ
シミュレーションアクセラレータ
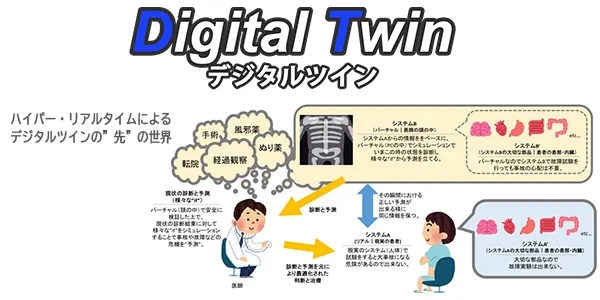
デジタルツイン
デジタルツインとは
電力システムの「デジタルツイン」
「デジタルツイン」によるハイパー・リアルタイムの世界
オートモーティブ概要
日本の自動車産業とOPAL-RTとの歩み
オートモーティブ概要
HIL Test BENCH
自動運転
バッテリマネジメントシステム用リアルタイムシミュレーション
ハイブリット・EV
自動車関連でのNIとの協業
開発プロセスにおけるリアルタイムMIL
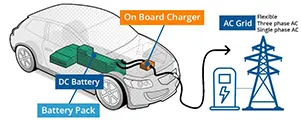
EV 電気自動車
オンボード充電器開発用のパワエレ
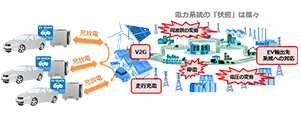
V2G(Vehicle-to-grid)~EVが社会インフラ(バーチャル巨大発電所)になる日
ADAS 先進運転支援システム
ADASへのRT-LAB Orchestra
大規模テストと検証用の協調シミュレーション環境
モータHILS
モータHIL
インバータの故障モード対応
モータHILSとハイブリット自動車
FEMベースのリアルタイムモーターシミュレーション
オートモーティブ適用事例
未来を牽引する自動運転車シミュレーション
自律フォワーダーナビゲーション
自動運転のレベル5へむけて
フランス国鉄の鉄道車両でのHIL
eVTOL (空飛ぶ車)
電気自動車のFPGAベースのPHIL / RCPシミュレーション
P-HIL統合電源テストシステム
シミュレーションによる信頼性の高いV2X通信の確保
Hardware-in-the-LoopとFast Prototyping
自動車のテストに対する大きな変化
大規模テストと検証用の効率的でオープンな協調シミュレーション環境
バッテリー
バッテリマネジメントシステム
蓄電池
TRANSCANADAハイウエイにおけるEV用高速DC充電システム開発
FPGAシミュレーション
FPGAシミュレーション
FPGAシミュレーションとeHS ソルバー
eHSベースシミュレーション解析事例
コラム (OPAL-RT)
イノベーションとブレークスルー
imperix - インペリックス
imperix Ltd
imperix社のRCPシステムの特徴
imperix RCP - 導入分野
学習教材としてのimperix RCP
研究の為のimperix RCP
産業の中のimperix RCP
EGSTONパワーHILアンプ
EGSTON Power Electronicsについて
EGSTON パワーHIL導入分野
EGSTON社製アンプとパワーHIL
EGSTON社製アンプと船舶
EGSTON社製アンプとe-モビリティ