

モータHILSとハイブリット自動車
オートモーティブシステムズ
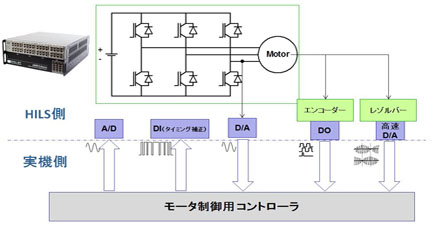
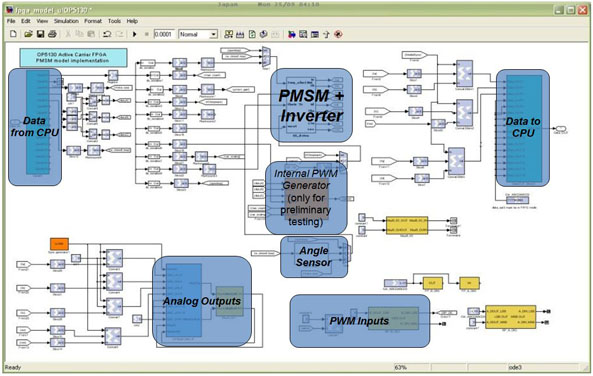
2レベルのIGBT/GTOインバータと、PMSMモータ2台をFPGA上に搭載した、fault(故障)現象まで検証が 可能な、バーチャルモータインバータシステムです。
インバータモデルは、FPGA上に実装されます。
それぞれのコンポーネントレベルで、IGBTのオープンやゲート信号が来ない場合等、 定常でない故障のシミュレーションが可能です。
モータモデルは、DQもしくはFEAベースのJMAG-RTモデルから選択できます。
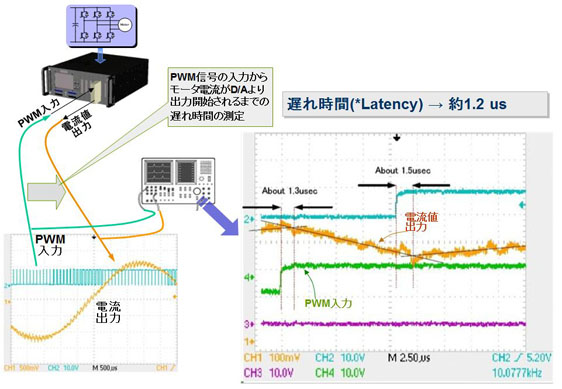
モータモデルもFPGA上に実装され、モータ電流のアナログ出力を、デジタル入力としてIGBTに取り込む場合の遅れを、1.2μsec近くに 収めることが出来ます。
PWMが非常に速い(100KHz)場合や、ヒステリシス電流コントロールも可能です。
インバータモデルは、FPGA上に実装されます。
それぞれのコンポーネントレベルで、IGBTのオープンやゲート信号が来ない場合等、 定常でない故障のシミュレーションが可能です。
モータモデルは、DQもしくはFEAベースのJMAG-RTモデルから選択できます。
モータモデルもFPGA上に実装され、モータ電流のアナログ出力を、デジタル入力としてIGBTに取り込む場合の遅れを、1.2μsec近くに 収めることが出来ます。
PWMが非常に速い(100KHz)場合や、ヒステリシス電流コントロールも可能です。
ハイブリッド自動車HILSシステムにとって、従来からある課題のひとつが、Fault(故障)モードへの対応でした。
Fault(故障)対応は、コントローラのテストには欠かせない機能です。
反面、これまでは不並列ダイオード付IGBTを使っているような、特別なインバータのFault(故障)を、オンラインでリアルタイムに実行することは、非常に難しいと言われてきました。
そのため、SiCデバイス等を使った50-100KHzのレンジでの、高周波PWMインバータにも対応できる、 Fault(故障)モード対応技術が待ち望まれておりました。
今回OPAL-RTは他社に先駆け、この問題を解決する為の実用的な手法を開発いたしました。
Fault(故障)対応は、コントローラのテストには欠かせない機能です。
反面、これまでは不並列ダイオード付IGBTを使っているような、特別なインバータのFault(故障)を、オンラインでリアルタイムに実行することは、非常に難しいと言われてきました。
そのため、SiCデバイス等を使った50-100KHzのレンジでの、高周波PWMインバータにも対応できる、 Fault(故障)モード対応技術が待ち望まれておりました。
今回OPAL-RTは他社に先駆け、この問題を解決する為の実用的な手法を開発いたしました。
2台のインバータ・モータモデルをFPGAに実装することで、ECUと接続してクローズドループテストを行う 際の、モデルの実行遅れを最小限に抑えることができます。
その事により、上記の故障モード等への対応が可能になりました。
その事により、上記の故障モード等への対応が可能になりました。
従来のFPGAモデルとの大きな違い
- IGBT回路の、Fault(故障)モード対応が可能になりました。
- DC-Linkモデルは、インダクタンスを内蔵させることが可能になりました。
- FEAで計算されたトルクは、FPGA上で計算されることで、サンプルレートが非常に速くなり、モデルのモジュール構造に追従した、シミュレーションが可能になりました。
FEA(Finite Element Analysis)ベースのモータ駆動モデル

開発された2モータインバータモデルは、最新のハイブリッド車の、モータ・インバータのHILSテストに最適です。
PMSMのインバータには、quadrature、Hall effects、resolverといった様々なエンコーダモデルが使われます。
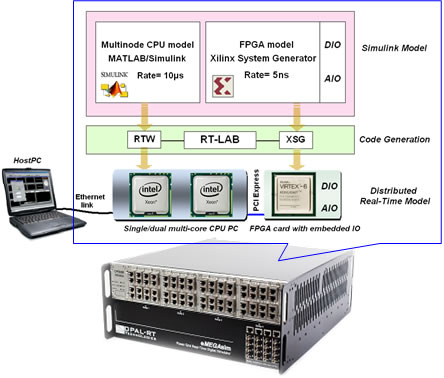
駆動回路は、RT-LABシステム上のCPUコアで動いている他のモデルと接続して動作しています。
PMSMインバータモデルは、5nsecの時間分解能(200 MHz Virtex-6 FPGA cardの場合)で動作し、モータモデルの制御周期は 250nsec(PMSM-DCLink-Inverter)です。
HILS上のモータインバータ回路は、デジタル及びアナログ入出力が、FPGAから直接コントロールされており、 ハードウエア・インザ・ループとして、全体を1.25μ秒の高速で動作させることが可能です。
2個のバーチャルモータは、phase-domain の等価式を使用し、d-qモデルでもインダクタンスやフラックスを 表現することが可能です。
さらに、JMAGモデルを使用した場合は、より精度良くこれらを表すことが出来ます。
PMSMのインバータには、quadrature、Hall effects、resolverといった様々なエンコーダモデルが使われます。
駆動回路は、RT-LABシステム上のCPUコアで動いている他のモデルと接続して動作しています。
PMSMインバータモデルは、5nsecの時間分解能(200 MHz Virtex-6 FPGA cardの場合)で動作し、モータモデルの制御周期は 250nsec(PMSM-DCLink-Inverter)です。
HILS上のモータインバータ回路は、デジタル及びアナログ入出力が、FPGAから直接コントロールされており、 ハードウエア・インザ・ループとして、全体を1.25μ秒の高速で動作させることが可能です。
2個のバーチャルモータは、phase-domain の等価式を使用し、d-qモデルでもインダクタンスやフラックスを 表現することが可能です。
さらに、JMAGモデルを使用した場合は、より精度良くこれらを表すことが出来ます。
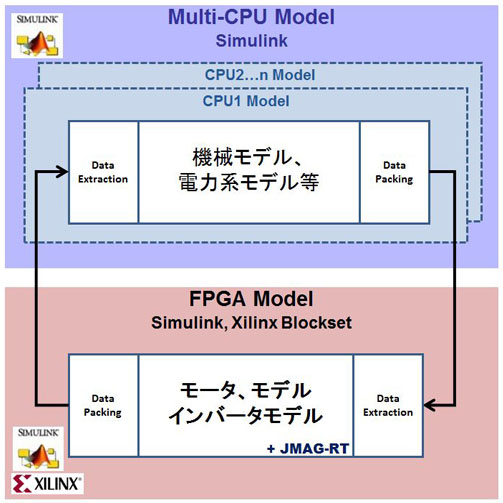
この計算式には以下の要素が使われFPGA上で演算が行われます。
L = inductance matrix
Iabc = startor current inside the winding
Ψabc = magnet flux linked into startor winding
R = startor resistance
Vabc = voltage across the stator windings
標準的なd-qモデルの場合、トルク値はd-qインダクタンスが変化しても即座に反映させることは出来ません。
JMAGモデルを使うとインダクタンスの変化に追従して、トルク値を変化させていくことが可能です。
この計算式には下記の要素が使われ、同じくFPGA上で演算が行われます。
pp = number of pair of poles
Iabc = motor current
Ψabc = motor flux in phase domain
| dLabc | = | derivative of phase domain inductance with regard to the rotor electric angle |
| dθ |
FPGA上のJMAGモデル
JMAGモデルは、インダクタンス情報をFPGA内にコード化して持っております。
インダクタンス計算をFPGAで行なうメリットは、CPUで行なったときに比べて、精度・スピードが飛躍的に良くなっていることです。(CPUでは、およそ400Hzが上限です)
トルク計算のルーチンも同様に、FPGA上にコード化されています。
JMAGモデルにおいては、トルク計算はインダクタンスを、角度で微分する必要があります。
その為、この微分値は前もって計算され、FPGAに置かれてなければなりません。
トルク値が、FPGAに置かれている大きなメリットは、モデルのモジュール構成を、そのまま生かしたシミュレーションが行えることです。
上記の要素を用いた等価式で書かれた、完全なモデルがFPGAに置かれます。
OPAL-RTが使用しているVirtex-6は、以前のVirtex-2proに比べて、20倍のリソースがあり、そこではJMAGのモータインバータモデルを、実時間で生成・実行することが出来ます。
インダクタンス計算をFPGAで行なうメリットは、CPUで行なったときに比べて、精度・スピードが飛躍的に良くなっていることです。(CPUでは、およそ400Hzが上限です)
トルク計算のルーチンも同様に、FPGA上にコード化されています。
JMAGモデルにおいては、トルク計算はインダクタンスを、角度で微分する必要があります。
その為、この微分値は前もって計算され、FPGAに置かれてなければなりません。
トルク値が、FPGAに置かれている大きなメリットは、モデルのモジュール構成を、そのまま生かしたシミュレーションが行えることです。
上記の要素を用いた等価式で書かれた、完全なモデルがFPGAに置かれます。
OPAL-RTが使用しているVirtex-6は、以前のVirtex-2proに比べて、20倍のリソースがあり、そこではJMAGのモータインバータモデルを、実時間で生成・実行することが出来ます。
JMAGモータモデルは、株式会社JSOLから供給されております、JMAGのJMAG-RTから生成された、インダクタンス、 逆起電力、トルクのデータを使うことが出来ます。
このアプローチでは、モータモデルは電流飽和や、スロット形状の影響から来るインダクタンス変化を考慮することが出来ます。
d-qモデルでは、正弦逆起電力(sinusoidal back-EMF)しか扱えませんが、JMAGモデルでは、非正弦逆起電力プロファイル(non-sinusoidal back-EMF)を、シミュレーションに取り込むことが可能です。
JMAG FEAによる、逆EMFとインダクタンスの典型的なプロファイル

FPGAモータモデルのシミュレーション能力
FPGAチップ上で行う複雑なモデル検証は、数式の設定や、FPGA上のコード化がかなり面倒で、専門のエンジニアの対応が必要です。このため、実際のHILS環境ではPMSMインバータにパルス変調を使い、オープンループテストで行います。
OPAL-RTHILSシステムは、ユーザーによってモデル上でデッドタイム、変調指数、角度オフセット、周波数を選択することが出来ます。


Nodalモデルによる完全なFaultシミュレーション

OPAL-RTのHILSシミュレータの大きな特徴は、Fault機能のシミュレーションに、NodalSolverを使用していることです。
この手法では、Faultは従来のFPGAの実装方法とは異なり、NodalSolver内でスイッチの動きとしてシミュレーションされます。
この方法を使うと、フィードバック等による遅延要素が無い為、 CPUベースの実装環境と同じ、fixed-causality と呼ばれるSolverを使うことが出来ます。
さらに、fixed-admittanceと呼ばれる手法が、NodalSolverの中では非常に速い時間ステップで動作できるため、効率的に適用できます。
このインバータモデルでは、不並行ダイオードのオープンFaultのような、個々のデバイスの機能不全を含む、ほとんどのFaultタイプのシミュレーションが可能です。
この手法では、Faultは従来のFPGAの実装方法とは異なり、NodalSolver内でスイッチの動きとしてシミュレーションされます。
この方法を使うと、フィードバック等による遅延要素が無い為、 CPUベースの実装環境と同じ、fixed-causality と呼ばれるSolverを使うことが出来ます。
さらに、fixed-admittanceと呼ばれる手法が、NodalSolverの中では非常に速い時間ステップで動作できるため、効率的に適用できます。
このインバータモデルでは、不並行ダイオードのオープンFaultのような、個々のデバイスの機能不全を含む、ほとんどのFaultタイプのシミュレーションが可能です。
適用されるFaultsは、下記 Table I にリストアップされています。
Table I. List of supported faults for the FPGA motor drive
| Inverter faults | Motor and DC-link faults |
| Inverter IGBT open fault (any) | DC-link short-circuit |
| Inverter Diode open fault (any) | Motor phase-phase fault |
| Inverter IGBT & Diode open fault (any) | Motor open-phase fault |
| Inverter IGBT/Diode short circuit (any) | |
| No-gate signals at IGBT, with or without natural rectification |
FPGA上で動作している、FEAモーインバータモデルでの、Faultのテスト結果です。
PMSMモータは、2対のポールを持っており、 Interior Magnet Type, Ld=31mH Lq=11mH ポール毎の電磁フラックスは、0.1584Wbです。
インバータIGBTのOPEN Fault
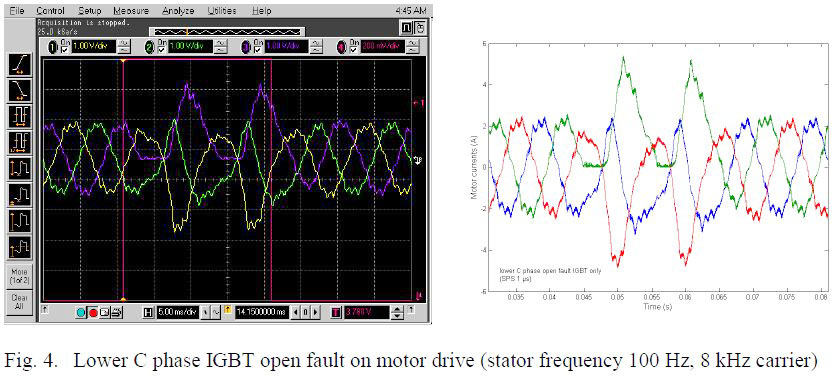
図4はFEAのPMSMインバータモデルで、100Hz動作・PWMは8KHzです。
このテストは、下段のIGBTのひとつのlegが、OPEN Fault(不並行ダイオードは動作している)を起こした結果です。
図は、シミュレータのアナログ出力で、右図は同じテストを、SimPowerSystemを使い1μで行った結果です。
結果を見ると、アナログ出力のモータ電流は、非常に似ています。
モータ電流の中に、リップルが確認されますが、これは、スタータースロットによって、誘発されたものです。
(FEAではこれらも再現できます)
インバータIBGT・ダイオード両方のOPEN Fault
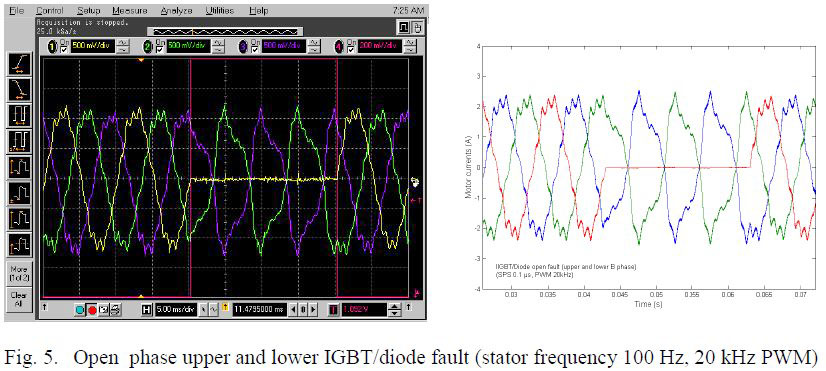
図5は、インバータlegの、IGBT/ダイオード両方のOPEN Faultで、この場合電流は0になります。
この場合のPWM周波数は、20KHzです。
このテスト結果でも、オシロスコープで捕らえられたリアルタイムの結果は、右側のSimscape Electrical™(旧SimPowerSystems™)におけるレファレンスの結果と、一致しています。
IGBTのゲート信号とモータ電流の関係

モータモデルの、アナログ出力に伴うデジタル入力による、IBGTのゲート信号を見ていただくと、モデルとオシロスコープの信号に、遅れが無いことが判ります。
これは、FPGAとI/O出力が、HILS内でうまく連動して、動作しているためです。
この図は、トルク/スピードマッピングのHILS結果(バーチャルモータ駆動)と、ベンチ計測(実機) 結果の誤差の比較です。
左の図は、FEAを用いたバーチャルモータの、トルク精度の表示です。
一方右は、dpモータモデルを使った場合の誤差です。
両方とも、モデルはFPGA上で動作しています。
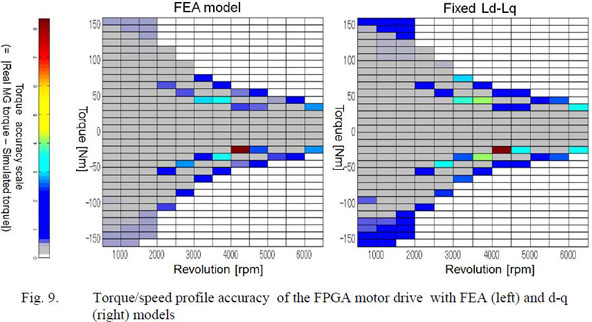
- 両方 (FEA 、d-q)のモデルとも、ほとんどの動作基点で良い精度が出ています。
- 出力定格の端のほうではJMAGモデルはDQモデルに比べるとずっと良い精度が出ています。
ほとんどの動作基点で、真値に近くなっていますが、4000 RPM で-30 N.mのあたりでは、両方とも大きな 誤差が出ています。
これは、この段階ではモータコントローラが、まだ完成されていない状態で、計測がされたもので、モータコントローラのキャリブレーションが、充分出来ていないのが原因と思われます。
次のステップでは、実機コントローラを使い、この部分のキャリブレーションを行う必要があります。
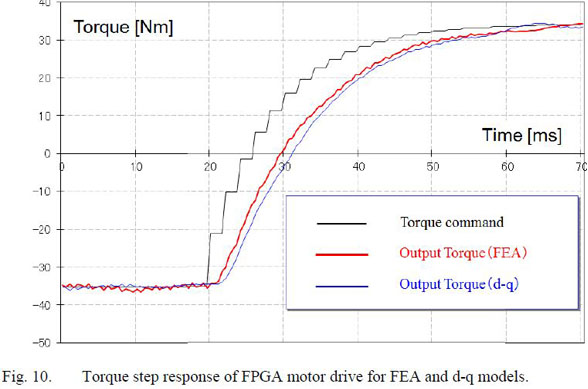
コントローラが要求するトルク出力に対して、モータモデルがどのように追従するかを示したものです。
下図のように、JMAGモデルのレスポンスは、d-qモデルよりコントローラの要求に近いものとなっています。
まとめ
Virtex-6FPGA上に、2つのバーチャルPMSMモータ駆動を、実装することが可能です。モデルはNodalSolverという手法をもとに作成されており、高精度のFEAデータから取り込まれハイブリット車や、複雑な モータ駆動に対応するHILSシステムで動作するように作られています。
インバータモデルは、Nodalアルゴリズムをコード化しすることで、全てのデバイスのFaultをきちんとサポートすることが可能です。
FPGAに実装することで、HILSシミュレーションのサンプリング時間を短縮し、高周波数PMWにも対応し、自動車産業では標準的な周波数である20KHzはもちろん、さらに速い100KHzにも対応が可能です。
FPGAに実装された、モータインバータモデルを使用することで、インバータの個々のコンポーネントのFaultを、HILSシミュレーションで完全サポートすることが可能です。
バーチャルなモータモデルを使用することで、新しい顧客からの要求に、すばやく柔軟に対応が出来、実機テストベンチの立ち上げや操作にかかる時間を、大幅に節約することが出来ます。
さらに、開発やテストにかかるコストを大幅にカットし、プロジェクト間でのプラットフォームを共有することで、製品化までの時間を大幅に短縮することが可能です。
A Dual High-Speed PMSM Motor Drive Emulator with Finite Element
Analysis on FPGA chip with Full Fault Testing Capability
株式会社デンソー殿とOPAL-RTが共同で出したモータHILSのハイブリット自動車への適用に関する論文を ベースに記述しています。
これらの機能を提供しているツール


